Download
1 / 30
330 likes | 967 Views
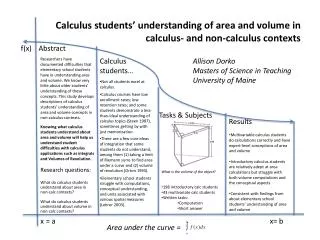
Vehicle Dynamics – It’s all about the Calculus…. J. Christian Gerdes Associate Professor Mechanical Engineering Department Stanford University. Future Vehicles…. Clean Multi-Combustion-Mode Engines Control of HCCI with VVA Electric Vehicle Design. Safe By-wire Vehicle Diagnostics

E N D
Vehicle Dynamics – It’s all about the Calculus… J. Christian Gerdes Associate Professor Mechanical Engineering Department Stanford University
Future Vehicles… Clean Multi-Combustion-Mode Engines Control of HCCI with VVA Electric Vehicle Design Safe By-wire Vehicle Diagnostics Lanekeeping Assistance Rollover Avoidance Fun Handling Customization Variable Force Feedback Control at Handling Limits
Electric Vehicle Design • How do we calculate the 0-60 time?
Basic Dynamics • Newton’s Second Law • With Calculus • If we know forces, we can figure out velocity
What are the Forces? • Forces from: • Engine • Aerodynamic Drag • Tire Rolling Resistance
Some numbers for the Tesla Roadster • From Tesla’s web site: • m = mass = 1238 kg • Rgear = final drive gear ratio = 8.28 • A = Frontal area = Height*width • Overall height is 1.13m • Overall width is 1.85m • This gives A = 2.1m2 but the car is not a box. Taking into account the overall shape, I think A = 1.8 m2 is a better value to use. • CD = drag coefficient = 0.365 • This comes from the message board but seems reasonable
More numbers for the roadster • From other sources • rwheel = wheel radius = 0.33m (a reasonable value) • Frr = rolling resistance = 0.01*m*g • For reference, see: http://www.greenseal.org/resources/reports/CGR_tire_rollingresistance.pdf • r = air density = 1.2 kg/m3 • Density of dry air at 20 degrees C and 1 atm • To keep in mind: • Engine speed w is in radians/sec • The Tesla data is in RPM • 1 rad/s = .1047 RPM • (or 0.1 for back of the envelope calculations) • 1mph = 0.44704 m/s
Motor issues • The website lists a motor peak torque of 375 Nm up to 4500RPM. This doesn’t match the graph. • They made changes to the motor when they chose to go with a single speed transmission. I think the specs are from the new motor and the graph from the old one. • Here is something that works well with the new specs:
Results of my simulation • Pretty cool – it gives a 0-60 time of about 3.8s • Tesla says “under 4 seconds” • Top speed is 128 mph (they electronically limit to 125)
P1 Steer-by-wire Vehicle • “P1” Steer-by-wire vehicle • Independent front steering • Independent rear drive • Manual brakes • Entirely built by students • 5 students, 15 months from start to first driving tests steering motors handwheel
Future Systems • Change your handling… … in software • Customize real cars like those in a video game • Use GPS/vision to assist the driver with lanekeeping • Nudge the vehicle back to the lane center
handwheel handwheel angle sensor handwheel feedback motor shaft angle sensor steering actuator power steering unit pinion steering rack Steer-by-Wire Systems • Like fly-by-wire aircraft • Motor for road wheels • Motor for steering wheel • Electronic link • Like throttle and brakes • What about safety? • Diagnosis • Look at aircraft
a b b ar d V af r Bicycle Model • Basic variables • Speed V (constant) • Yaw rate r – angular velocity of the car • Sideslip angle b – Angle between velocity and heading • Steering angle d – our input • Model • Get slip angles, then tire forces, then derivatives
Vehicle Model • Get forces from slip angles (we already did this) • Vehicle Dynamics • This is a pair of first order differential equations • Calculate slip angles from V, r, d and b • Calculate front and rear forces from slip angles • Calculate changes in r and b
Calculate Slip Angles a b b ar d V af r ar d+ af
Lateral Force Behavior • ms=1.0 and mp=1.0 • Fiala model
When Do Cars Spin Out? • Can we figure out when the car will spin and avoid it?
Comparing our Model to Reality loss of control linear nonlinear
Lanekeeping with Potential Fields • Interpret lane boundaries as a potential field • Gradient (slope) of potential defines an additional force • Add this force to existing dynamics to assist • Additional steer angle/braking • System redefines dynamics of driving but driver controls
Lanekeeping Assistance • Energy predictions work! • Comfortable, guaranteed lanekeeping • Another example with more drama…
Handling Limits • What happens when tire forces saturate? • Front tire • Reduces “spring” force • Loss of control input • Rear tire • Vehicle will tend to spin • Loss of stability handling limits linear region Is the lanekeeping system safe at the limits?
Countersteering • Simple lanekeeping algorithm will countersteer • Lookahead includes heading error • Large heading error will change direction of steering • Lanekeeping system also turns out of a skid Lateral error Projected error Example: Loss of rear tire traction
Yaw Stability from Lanekeeping Lanekeeping Active Lanekeeping Deactivated Controller countersteers to prevent spinout
A Closer Look Controller response to heading error prevents the vehicle from spinning
Conclusions • Engineers really can change the world • In our case, change how cars work • Many of these changes start with Calculus • Modeling a tire • Figuring out how things move • Also electric vehicle dynamics, combustion… • Working with hardware is also very important • This is also fun, particularly when your models work! • The best engineers combine Calculus and hardware