Download
1 / 17
170 likes | 256 Views
PADS Paraplegic Assisted Driving System. Aaron Broome Robert Graham Lamar Turnbull Tylor Palumbo Erick Moton Georgia Institute of Technology ECE 4007 Moore Fall 2010. Project Overview Autonomous speed control system

E N D
PADS Paraplegic Assisted Driving System Aaron Broome Robert Graham Lamar Turnbull Tylor Palumbo Erick Moton Georgia Institute of Technology ECE 4007 Moore Fall 2010
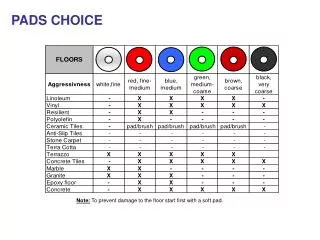
Project Overview • Autonomous speed control system • Provide paraplegics with an alternative means of transportation through the use of the following: • Linear Actuator controlled acceleration/braking • Updated speed and related information display • LED display • Accurate speed calculation • 4-color recognition (Red, green, blue, black) • Manual override switch for emergency shutdown and reset • Equipment Cost: $654
Technical Objectives Autonomous Speed Control • Use object recognition to detect 3 speed zones and stop sign • Matlab RGB color detection • Calculate speed and compare with latest detected sign • Measure revolutions/sec from PIC timer and counter • Compare with RGB values obtained from Matlab • Control gas/brake pedal to adjust to desired speed • High/low output logic from PIC sent to H-bridge based on color and speed
Prototype Design Overview Golf Cart Laptop w/ USB camera & Matlab Hall Effect Speed Sensor Qwikflash (PIC18F452) Development Board 4” and 6” Linear Actuators
Prototype Design Overview Qwikflash Development Board H-Bridge Linear Actuators Hall Effect Speed Sensor
Hardware Block Diagram Laptop with USB Camera Serial Connection Dual H-Bridge Qwikflash Board Hall Effect Speed Sensor 4/6” Linear Actuators 12V Sealed Lead Acid Battery
Linear Actuator Installation Dimensions: 20”x16”16.5”
Prototype Design & Description • Prototype currently works as desired in each speed zone. Desired specifications hit or miss • Tests: • Color Recognition Time: Matlab Timing Function • Zone Reaction Times: Real-time road tests
Procedure Flow Diagram PIC18F452 Operations Matlab Operations Webcam Color Detection Speed Sensor Pulse (Input Port Signal) Counter/Timer0 RS232 Send/Receive Subroutine Speed Calculator LCD Display Speed/Color Combined Response Subroutine RS232 Send/Receive Subroutine H-Bridge (Output Port Signal) Pushbutton (Reset)
Hall Effect Speed Sensor • Speed Calculation
Problems & Solutions • Speed Calculation via Timer/Counter • Refresh rate for reading input pulses/sec .5 seconds used as refresh in order to keep speed updated at a regular rate • Color Sensing and Object Recognition • RGB threshold for various lighting conditions RGB value threshold was eliminated due to lack of time • Number of Magnets Mounted to Wheel • Quality of sample used to calculate speed 8 strips of magnets were attached to wheel to increase accuracy of speed calculation Linear Actuator Response Timing Linear actuator set to extend and/or retract for one second every response period
Budget Analysis • Project Budget: $440 • Amount spent to date: $439.79 • Microcontroller provided by Georgia Tech Savannah
Future Work • The PADS prototype system can be continued by future ECE students with additional work that could consist of the following: • Implementation of LIDAR for object avoidance • Autonomous control of the steering wheel • GPS-assisted route navigation
Questions Additional information located on project website: http://www.tinyurl.com/gtsavseniordesign