Download
1 / 41
420 likes | 854 Views
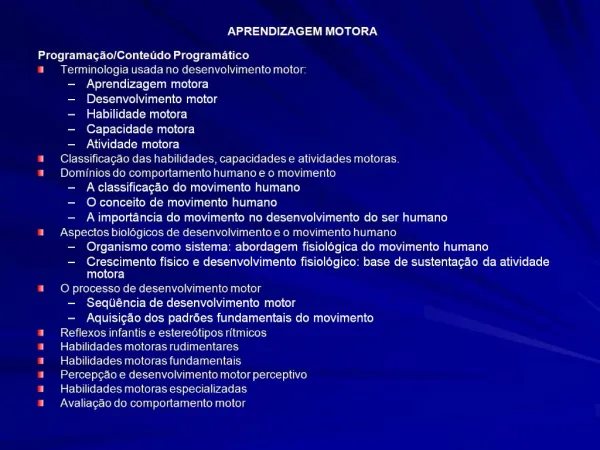
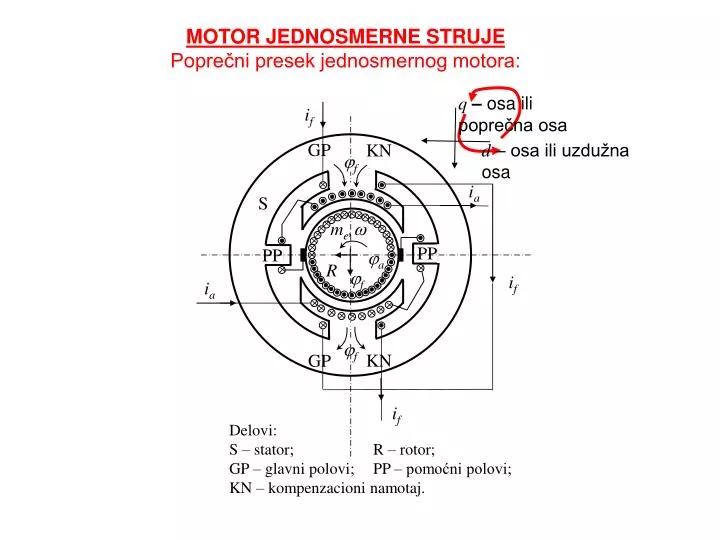
q – osa ili poprečna osa. i f. GP. d – osa ili uzdužna osa. KN. f. i a. S. m e , . PP. PP. a. R. f. i f. i a. f. KN. GP. i f. MOTOR JEDNOSMERNE STRUJE Poprečni presek jednosmernog motora:. Delovi: S – stator R – rotor GP – glavni polovi PP – pomoćni polovi

E N D
q– osa ili poprečna osa if GP d – osa ili uzdužna osa KN f ia S me, PP PP a R f if ia f KN GP if MOTOR JEDNOSMERNE STRUJE Poprečni presek jednosmernog motora: Delovi: S – stator R – rotor GP – glavni polovi PP – pomoćni polovi KN – kompenzacioni namotaj.
pogonski kraj komutatorski kraj 1 četkice 2 opruge četkica 3 ležajevi na komutatorskom kraju 4 ležajevi na pogonskom kraju 5 armatura (rotor) 6 pomoćni pol i njegov namotaj 7 glavni pol i njegov namotaj 8 držač ležišta (komutaorski kraj) 9 zaštitni poklopac 10 konzola četkice 11 ventilator na rotoru 12 držač ležišta (pogonski kraj) 13 kućište namotaja statora
Osobine: - pogodne mehaničke karakteristike - jednostavno upravljanje - složena konstrukcija (kolektor) - održavanje - mala preopteretljivost (kompenzacioni namotaj) - ograničena maksimalna brzina. Primena: - regulisani pogon - električna vuča.
Ra La + me, Rf + if f + I ua Lf M e uf mm Nf ia POGON SA MOTOROM JEDNOSMERNE NEZAVISNA POBUDA Uprošćena, principijelna šema:
Motor, reduktor, opterećenje. reduktor motor jednosmerne struje opterećenje (valjak)
Matematički model, sistem jednačina: diferencijalne jednačine: (1) (2) (3) (4)
Slika konvertora objasnjenje uz poziciju! 0 + 900 − 900 I M
algebarske jednačine: - ukupan fluks - kada je mašina nezasićena
jf jfb Lfb Lf ifb if
A: N: A: NORMALIZACIJA • - uprošćenje jednačina; • - eliminacija dimenzija svih veličina osim vremena; • svođenje vrednosti svih veličina na • isti nivo nezavisno od snage motora. A: - apsolutni domen; N: - normalizovani domen.
Postupak normalizacije: indeksi: - * normalizovana vrednost veličine x; - b bazna vrednost za veličinu x. Napomena: Indeks "*" se može izostaviti ako su sve veličine u izrazu normalizovane, ali se tada to mora naglasiti sa oznakom "N:". U mešovitim izrazima indeks "*" je obavezan. A: Jednačine i izrazi u apsolutnom domenu. N: Jednačine i izrazi u normalizovanom domenu. A: Jednačine i izrazi u apsolutnom domenu.
Bazne vrednosti. osnovne (usvojene): izvedene:
NORMALIZACIJA MATEMATIČKOG MODELA POGONA Jednačina (1)/ !!!!!!!!!! Ta - elektromagnetna vremenska konstanta indukta.
Jednačina (2)/ Kada je mašina nezasićena: Tf – elektromagnetna vremenska konstanta induktora.
Jednačina (3) / Tm – mehanička vremenska konstanta pogona.
Jednačina (4)/b Priroda veličine (položaj) dozvoljava proizvoljno biranje njene bazne vrednosti. Za: dobija se:
STATIČKE KARAKTERISTIKE POGONA SA NEZAVISNO POBUDJENIM JEDNOSMERNIM MOTOROM Jednačine (1); (2) i (3) u stacionarnom stanju: A: Iz jednačine (4) u stacionarnom stanju sledi: Specijalni slučaj!!! = 0 !!
N: U nominalnom režimu: ua nom = 1; ia nom = 1; nom = 1 . Iz jednačine (1) se dobija: Ra nom- sopstveni otpor indukta. A:U praksi je: Kod manjih motora je Ra nom* veće, a kod većih motora manje.
N:Sad se može napisati: ali < 1 !!! Takođe važi:
Iz jednačina koje važe u stacionarnom stanju dobijaju se analitički izrazi za statičke karakteristike motora - pogona. N: 0 – brzina idealnog praznog hoda - pad brzine Takodje, dobija se i MEHANIČKA KARAKTERISTIKA:
UTICAJ PROMENE NAPONA INDUKTA NA OBLIK STATIČKIH KARAKTERISTIKA Pri konstantnoj pobudi motora (f = const) statičke karakteristike: = i(ia) i = m (m'm) Važne napomene: 1. u praksi -1<ua < 1; 2. u praksi f = f nom ; 3. posmatra se opseg promene opterećenja u kome magnetna reakcija indukta ne dolazi do izražaja (do m'mmax). Ovaj opseg odredjen je maksimalno dozvoljenom strujom motora (komutacijom) koja je u praksi iamax (1,5 ÷ 2,5). Prema tome:
w w N N 1 1 ia mm <1 1
UTICAJ PROMENE POBUDE NA OBLIK STATIČKIH KARAKTERISTIKA Pri konstantnom naponu indukta ( ua = ua nom = const.). Karakteristične vrednosti na mehaničkoj karakteristici su: N: brzina idealnog praznog hoda momenat kratkog spoja Napomena: Ovaj momenat kratkog spoja je fiktivan, stvarni momenat kratkog spoja je znatno manji zbog uticaja magnetne reakcije indukta.
wo mk
Kod promene fluksa je: smenom u i (ii ) dobija se: HIPERBOLA!!!!! Ako se reši jednačina: HIPERBOLA - OBVOJNICA !!!!
Zbog konstruktivnih razloga brzina motora je ograničena: Pa je: Praktično ima smisla samo smanjivati fluks: f< f nom
Crvenogranicamogućih radnih tačaka. Plavo granica teorijski mogućih radnih tačaka. Maksimalna brzina za dati momenat.
f ua 1 ua fnom e≈const. -1 1 0 -1 KONBINOVANO UPRAVLJANJE ( NAPONOM INDUKTA I PREKO POBUDE) N:
} ua=1 f< fnom ua=1; f= fnom } 1 0<ua<1 f= fnom mm -1 0 1 } ua = 0 0>ua>-1 f= fnom -1 ua=-1; f= fnom } ua=-1 f< fnom Područje mogućih radnih tačaka u (mm ;) ravni.
UTICAJ DODATOG OTPORA U KOLU INDUKTA NA STATIČKE KARAKTERISTIKE N: Odnos padova brzine:
w wo mm mm