Download
1 / 9
90 likes | 200 Views
Instructor: Spyros Reveliotis. IE7201: Production & Service Systems Engineering Fall 2009 Closure. Course Objectives. Provide an understanding and appreciation of the different resource allocation and coordination problems that underlie the operation of production and service systems.

E N D
Instructor: Spyros Reveliotis IE7201: Production & Service Systems EngineeringFall 2009Closure
Course Objectives Provide an understanding and appreciation of the different resource allocation and coordination problems that underlie the operation of production and service systems. Enhance the student ability to formally characterize and study these problems by referring them to pertinent analytical abstractions and modeling frameworks. Develop an appreciation of the inherent complexity of these problems and the resulting need of simplifying approximations. Systematize the notion and role of simulation in the considered problem contexts. Define a “research frontier” in the addressed areas.
Course Outline 1.Introduction: Course Objectives, Context, and Outline Contemporary organizations and the role of Operations Management (OM) Corporate strategy and its connection to operations The organization as a resource allocation system (RAS) Classification of Production Systems on the basis of their workflow structure and control policies The underlying RAS management problems and the need for understanding the impact of the underlying stochasticity The basic course structure 2.Modeling and Analysis of Production and Service Systems as Continuous-Time Markov Chains (A brief overview of the key results of the theory of Markov Chain and Continuous-Time Markov Chains (CT-MC)) Birth-Death Processes and the M/M/1 Queue Transient Analysis Steady State Analysis Modeling more complex behavior through CT-MCs Single station systems with multi-stage processing, finite resources and/or blocking effects Open (Jackson) and Closed (Gordon-Newell) Queueing networks Gershwin’s Models for Transfer Line Analysis Bucket Brigades
Course Outline (cont.) 3.Accommodating non-Markovian behavior Phase-type distributions and their role as approximating distributions The M/G/1 queue The G/M/1 queue The G/G/1 queue The essence of “Factory Physics” (BCMP networks) 4.Performance Control of Production and Service systems Controlling the “event rates” of the underlying CT-MC model (an informal introduction of the dual Linear Programming formulation in standard MDP theory) A brief introduction of the theory of Markov Decision Processes (MDPs) and of Dynamic Programming (DP) An introduction to Approximate DP An introduction to dispatching rules and classical scheduling theory Buffer-based priority scheduling policies, Meyn and Kumar’s performance bounds and stability theory
Course Outline (cont.) 5. Behavioral Control of Production and Service Systems Behavioral modeling and analysis of Production and Service Systems Resource allocation deadlock and the need for liveness-enforcing supervision (LES) Petri nets as a modeling and analysis tool A brief introduction to the behavioral control of Production and Service Systems
What (I hope that) we eventually achieved • A solid exposition of • DTMC theory • Properties of exponential distributions and Poisson processes • CTMC and Semi-Markov theory • Classical queueing theory • (An introduction to reversibility theory and its implications) • Demonstration of the application of the aforementioned theory in the modeling and performance evaluation of production and service systems • Bucket Brigades • Factory Physics type of models • The “method of stages” for modeling non-Markovian behavior through Markovian models • Other examples presented in class and in reading assignments (e.g., excerpt from Gershwin) • Homework problems • Establishing some proficiency for working with the aforementioned stochastic models • Indentify / recognize cases accepting exact modeling • “Fit” more general situations / behaviors to the presented queueing models for some approximating analysis • Go back to (semi-)Markov models using the method of stages, and maybe some approximating techniques on the resulting Markov model to deal with the complexity problems arising from the “curse of dimensionality”
Towards performance control… • In case of a small number of alternatives, use an appropriate (descriptive) model to evaluate the performance of each alternative. • For cases where the system performance can be explicitly expressed as a function of the parameter of interest, formulate and solve an appropriate optimization (mathematical programming) problem. • Markov Decision Processes (MDP): • Transition probabilities out of each state are functions of decisions / actions taken at these states. • Selections of decisions to be followed at each state (and visit), constitute a policy. A policy can also be deterministic or randomized. • A functional defined over the sequence of visited states and performed actions at each state characterizes the performance of the policy instantiation. • The expected valueof this functional over all the possible sample paths generated by the considered policy, when starting from a certain initial state, defines the policy value at this state. • In an MDP setting we want to identify a policy that optimizes the value of each state. • The state function providing their values under an optimal policy is known as the value function of the MDP problem. • Dynamic Programming (DP) is a set of methods that tries to compute the value function of a given MDP problem by building upon the fundamental remark that the value of a (state, action) pair at a certain time / period, can be decomposed as • an immediate value for taking the considered action at the given state in the current period, plus • the expected value of the resulting state. The above decomposition is the essential content of the, so called, Bellman’s equation. • Availability of the value function reduces the problem of computing an optimal decision for any given state, as a local optimization problem over the entire set of actions available at that state. • Classical DP methods are limited by the very large size of the underlying state spaces, that renders intractable even the enumeration of the entire value function! These complexity problems are collectively known as the “curse of dimensionality”. • Approximate DP (ADP) seeks to deal with the curse of dimensionality problems by working with an approximate compact representation of the value function. This approach necessitates the development of • a representational space able to support effective compact approximations of the problem value function; • techniques for “fitting” the aforementioned representation to the particular value function corresponding to any given problem instantiation.
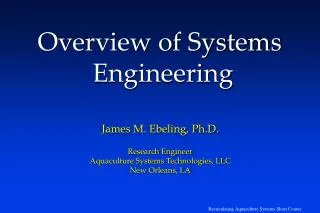
c1 w1 1 t1 s1 f1 t2 c2 w2 2 t3 s2 f2 t4 c3 w3 3 t5 s3 f3 t6 Petri nets and behavioral control of RAS A (generalized stochastic) Petri net modeling the CQN of Problem 8.15 in Homework #3 • Petri nets offer an unambiguous and compact representation of DES structure and behavior. • Reachability / Coverability analysis is the systematic construction of the underlying state space through an efficient enumeration of all the possible behaviors generated by the system. • The availability of the reachable state space enables an assessment of various qualitative properties of the system behavior (like boundedness, liveness, deadlock-freedom, fairness, etc.) • For many PN sub-classes, the assessment of many such qualitative properties can be performed through much more efficient analytical / algebraic techniques that exploit the information on thesystem structure and its invariants provided by the PN model itself. • In the context of DES modeling the resource allocation taking place in production and service systems, an important issue is the maintenance oflive behavior by preventing the formation of deadlock. • Generalized Stochastic PNs allow the modeling of the passage of time by distinguishing between instantaneous and timed transitions. Timed transitions involve a delay in their firing, which is drawn from an exponential distribution. Their timed-based dynamics corresponds to a semi-Markov process defined on the underlying state space.
Thanks for being in the class and Have a Great Holiday!