Download
1 / 35
350 likes | 455 Views
Robotermechanik. Trippelmechanismus. Schussmechanismus. Antriebsmotoren. Steuerungsproblemstellung. Steuerelektronik. DEBUG-Schnittstelle Test und so. DECT MD32 Engine 19.2 KBit. HC12 2KB RAM 64KB Flash. RS-232 CAN-Bus. 4 PWM-gesteuerte DC-Getriebemotoren mit Impulsgeber.

E N D
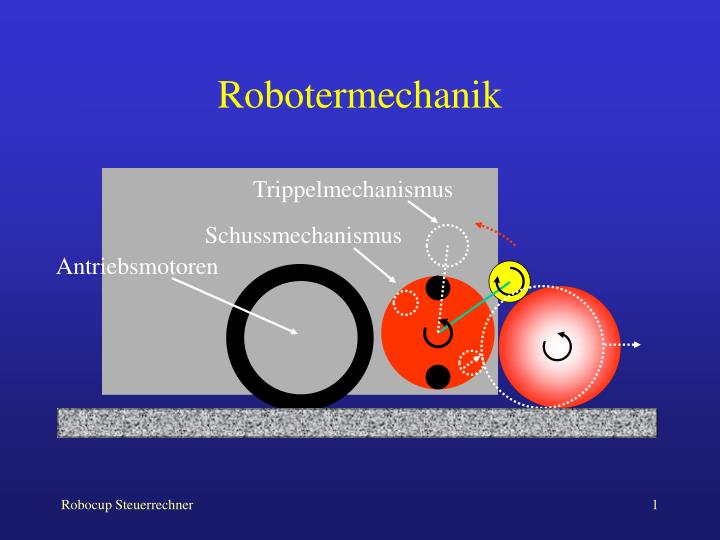
Robotermechanik Trippelmechanismus Schussmechanismus Antriebsmotoren Robocup Steuerrechner
Steuerungsproblemstellung Robocup Steuerrechner
Steuerelektronik DEBUG-Schnittstelle Test und so DECT MD32 Engine 19.2 KBit HC12 2KB RAM 64KB Flash RS-232 CAN-Bus 4 PWM-gesteuerte DC-Getriebemotoren mit Impulsgeber 8 2A-MOSFET- Schalter 8 Bit TTL Eingänge 4 Servomotoren Robocup Steuerrechner
Motorola HC12-Microcontroller Robocup Steuerrechner
HC12-Blockschaltbild Robocup Steuerrechner
UHF-FunkmoduleSE200 momentan im Einsatz Robocup Steuerrechner
DatenschnittstelleInitialisieren Robocup Steuerrechner
DatenschnittstelleEmpfangen Robocup Steuerrechner
DatenschnittstelleSenden Robocup Steuerrechner
UHF-FunkmoduleSILRX-433-A TXM-433-A • 433 MHz SAW controlled wide band FM reception • High data rates, 5 kbps (-A versions) and 10kbps ( -F versions) • Analogue and Digital data outputs • Carrier detect output • Fast enable time,< 3 ms for duty cycle power save use • Wide supply range, 4.0V to 9.0V • Low current, 13 mA continuous, 130µA on power save (100:1) Robocup Steuerrechner
UHF-Funkmodule TX1 RX1 • Transmitter - TX1 • up to 10 kb/s • Operation from 2.2V to 10V @ 9.5mA • Frequencies available as standard: 173.225MHz, 173.250MHz • Usable range to 10km+ • Receiver - RX1 • Operation from 2.7V to 10V @ 12mA Robocup Steuerrechner
UHF-Funkmodule TX3 RX3 • Transmitter – TX3 • up to 64 kb/s • Operation from 2.2V to 13V @ 7.5mA • Receiver – RX3 • Operation from 2.7V to 10V @ 9.5mA Robocup Steuerrechner
UHF-FunkmoduleBiM • Features: • ETS 300-220 tested for European use on 433.92 MHz (BiM-433-F) • Single 4.5 to 5.5 Volt supply < 15mA (tx or rx) • Half duplex data at upto 40 kbit/s • Reliable 30 metre in-building range • Direct interface to 5V CMOS logic • Fast 1ms power up enable for duty cycle power saving Robocup Steuerrechner
UHF-FunkmoduleBiM2 • Technical Summary • Size 23 x 33 x 4 mm • Operating frequency 433.92MHz • TX power 10mW @ 5V • Supply 3 to 6 volt @ 12mA tx & 17mA rx • Data rates to 64 Kbit/s Robocup Steuerrechner
DECT MD32-Modul Robocup Steuerrechner
DECT MD32 Robocup Steuerrechner
DECT MD32 Schnittstelle Robocup Steuerrechner
Datenfunkverbindung Robocup Steuerrechner
Servomotor Impulse alle 20ms 0,8ms Impulsbreite Rechter Anschlag Zwischenstellung Linker Anschlag 0,8...1,2ms Impulsbreite Impuls +4...6V 1,2ms Impulsbreite GND Ohne Impulse entwickelt der Servo kein Haltemoment. Der max. Drehwinkel beträgt 180°. In ca. 0,1..0,2 sec werden 60° Drehung erreicht. Robocup Steuerrechner
Getriebemotor Robocup Steuerrechner
Motortreiber L298P Robocup Steuerrechner
L298 Innenschaltung Robocup Steuerrechner
L298P Beschaltung Robocup Steuerrechner
Drehimpulserzeugung Robocup Steuerrechner
Drehzahlmessung Robocup Steuerrechner
Zählrichtung Robocup Steuerrechner
Motorensteckverbinder Robocup Steuerrechner
Schnittstelle zum HC-12PWM und Drehzahlmessung pro Motor: IGAx Encoder A IGBx Encoder B Rx Rückwärts Vx Vorwärts Ex Freigabe Robocup Steuerrechner
Schnittstelle zum HC-12Motorsteuerung und Bremsvorgang pro Motor: IGAx Encoder A IGBx Encoder B Rx Rückwärts Vx Vorwärts Ex Freigabe Robocup Steuerrechner
Motoransteuerung Robocup Steuerrechner
DigitalausgangMOSFET Schalttransistor 14A Spitzenstrom 2A Dauerstrom RDS-ON=0,1 Ohm Robocup Steuerrechner
DigitaleingangHC-12 Portnutzung Robocup Steuerrechner
Elektronikspannung2,5-9,6V Eingangsspannung - 5V/1A Ausgangsspannung Robocup Steuerrechner
