Download
1 / 1
10 likes | 153 Views
Senior Project – Computer Engineering – Class of 2005 IR-to-RF Link for the Lego RCX Eric P. Walklet Advisor: Prof. John Spinelli. Abstract.

E N D
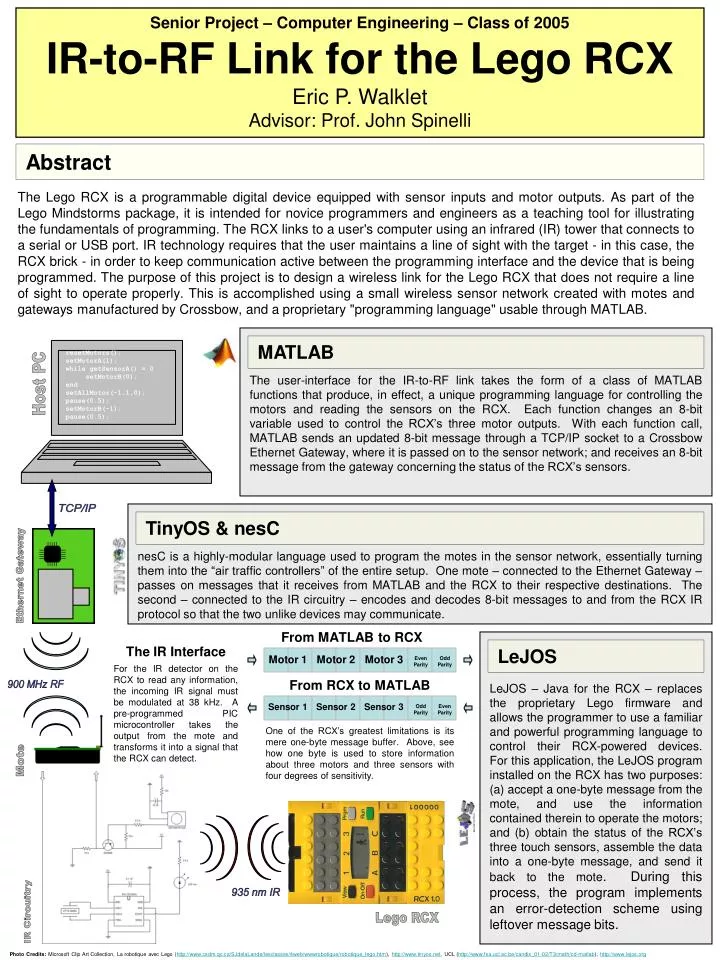
Senior Project – Computer Engineering – Class of 2005 IR-to-RF Link for the Lego RCX Eric P. Walklet Advisor: Prof. John Spinelli Abstract The Lego RCX is a programmable digital device equipped with sensor inputs and motor outputs. As part of the Lego Mindstorms package, it is intended for novice programmers and engineers as a teaching tool for illustrating the fundamentals of programming. The RCX links to a user's computer using an infrared (IR) tower that connects to a serial or USB port. IR technology requires that the user maintains a line of sight with the target - in this case, the RCX brick - in order to keep communication active between the programming interface and the device that is being programmed. The purpose of this project is to design a wireless link for the Lego RCX that does not require a line of sight to operate properly. This is accomplished using a small wireless sensor network created with motes and gateways manufactured by Crossbow, and a proprietary "programming language" usable through MATLAB. MATLAB resetMotors(); setMotorA(1); while getSensorA() = 0 setMotorB(0); end setAllMotor(-1,1,0); pause(0.5); setMotorB(-1); pause(0.5); The user-interface for the IR-to-RF link takes the form of a class of MATLAB functions that produce, in effect, a unique programming language for controlling the motors and reading the sensors on the RCX. Each function changes an 8-bit variable used to control the RCX’s three motor outputs. With each function call, MATLAB sends an updated 8-bit message through a TCP/IP socket to a Crossbow Ethernet Gateway, where it is passed on to the sensor network; and receives an 8-bit message from the gateway concerning the status of the RCX’s sensors. Host PC TCP/IP TinyOS & nesC nesC is a highly-modular language used to program the motes in the sensor network, essentially turning them into the “air traffic controllers” of the entire setup. One mote – connected to the Ethernet Gateway – passes on messages that it receives from MATLAB and the RCX to their respective destinations. The second – connected to the IR circuitry – encodes and decodes 8-bit messages to and from the RCX IR protocol so that the two unlike devices may communicate. Ethernet Gateway From MATLAB to RCX The IR Interface LeJOS Motor 1 Motor 2 Motor 3 Even Parity Odd Parity For the IR detector on the RCX to read any information, the incoming IR signal must be modulated at 38 kHz. A pre-programmed PIC microcontroller takes the output from the mote and transforms it into a signal that the RCX can detect. From RCX to MATLAB LeJOS – Java for the RCX – replaces the proprietary Lego firmware and allows the programmer to use a familiar and powerful programming language to control their RCX-powered devices. For this application, the LeJOS program installed on the RCX has two purposes: (a) accept a one-byte message from the mote, and use the information contained therein to operate the motors; and (b) obtain the status of the RCX’s three touch sensors, assemble the data into a one-byte message, and send it back to the mote. During this process, the program implements an error-detection scheme using leftover message bits. 900 MHz RF Sensor 1 Sensor 2 Sensor 3 Odd Parity Even Parity One of the RCX’s greatest limitations is its mere one-byte message buffer. Above, see how one byte is used to store information about three motors and three sensors with four degrees of sensitivity. Mote 935 nm IR IR Circuitry Lego RCX Photo Credits: Microsoft Clip Art Collection, La robotique avec Lego (http://www.csdm.qc.ca/SJdelaLande/lesclasses/4web/wwwrobotique/robotique_lego.htm), http://www.tinyos.net, UCL (http://www.fsa.ucl.ac.be/candis_01-02/T3/math/cd-matlab), http://www.lejos.org