Download
1 / 10
110 likes | 251 Views
Natural Motion Capture for Humanoid Robots. Dr. Mike Goodrich Alan Atherton Tim Major Tyler Gill. Background. Robots are being used in many domains Military Construction Medicine Consumer. Problem. Teaching robots is hard Often requires experience in animation. Motion Capture.

E N D
Natural Motion Capture for Humanoid Robots Dr. Mike Goodrich Alan Atherton Tim Major Tyler Gill
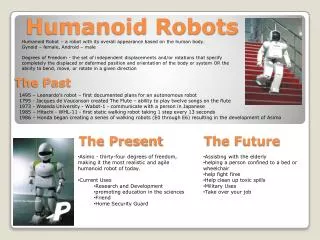
Background • Robots are being used in many domains • Military • Construction • Medicine • Consumer
Problem • Teaching robots is hard • Often requires experience in animation
Motion Capture • One recent approach to simplifying the process • Previous approaches require specific equipment and setup
Our Work • Joint with Communication Disorders and Mechanical Engineering departments • Using our robot, Troy, to help children with autism
Our Work • Clinicians have Troy act out basic actions • Wave • Roll a ball • Sing songs with gestures • Display facial expressions • Etc.
Our Work • In the past, whenever the clinicians wanted new actions, an engineer would have to create it by hand • This is what our work is trying to solve • Our goal is to design an interface simple enough for someone without experience in animation to create these simple actions for the robot
Future Work • What was just shown is a proof of concept, and proves that motion capture interfaces can be created that are intuitive • Current work: • Clean up some of the quirks in the tracking • Compare this to mouse based animation
Thanks • Dr. Goodrich – Supporting this project and coordinating with the other departments • Alan Atherton – Guiding the project and interface • Tim Major – Built the avatar and interface • Honda – Funding the project