Download
1 / 14
140 likes | 293 Views
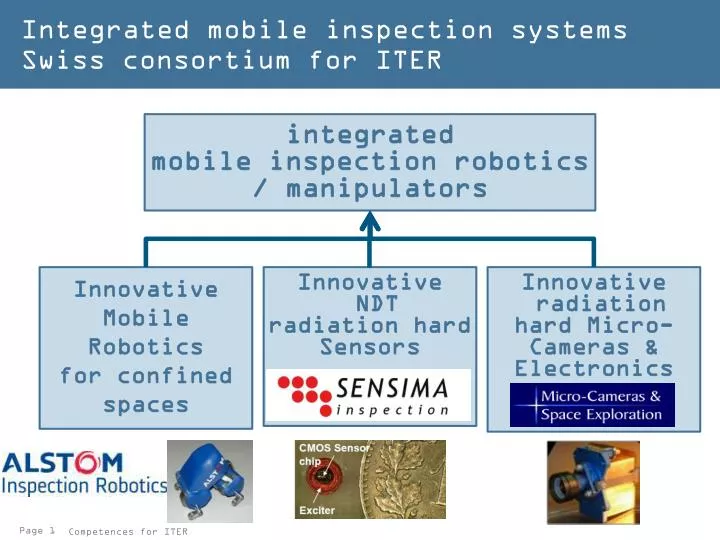
Integrated mobile inspection systems Swiss consortium for ITER. integrated mobile inspection robotics / manipulators. Innovative Mobile Robotics for confined spaces. Innovative NDT radiation hard Sensors. Innovative radiation hard Micro-Cameras & Electronics .

E N D
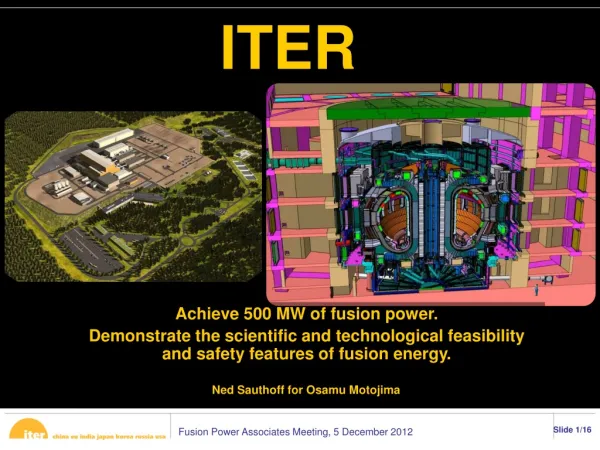
Integrated mobile inspection systemsSwiss consortium for ITER integrated mobile inspection robotics / manipulators Innovative Mobile Roboticsfor confined spaces Innovative NDT radiation hard Sensors Innovative radiation hard Micro-Cameras & Electronics Competences for ITER
Competences / offering for ITER • Field proven integrated robotics for operation in confined spaces • non destructive testing • visual inspection • simple handling tasks • Intelligent navigation • Autonomous / sensor based navigation (weld following, contour following) • Vision based control • High level development & engineering services • Electronics • Mechanics • Sensor technology Competences for ITER
Projects of interest in ITER • Inspection of Divertor cooling pipes • (pipe bore tools) • Divertor Remote Handling System Procurement Package - 23.02 • 2. Piping tools for neutral beams remote handling • Neutral Beam Cell Remote Handling System - 23.05 Competences for ITER
Drivers / Technology / Core Competences • Robust Mechanical Design • Drives / Steering • Miniaturization • Manufacturing • Protection (immersion etc.) • Mobility • Free Movement • Obstacle Handling • Compactness / Agility access to human inaccessible areas • High Tech Mechatronic / Electronic Design • On board computing(controller, programming) • navigation (sensor + logic) • Integration navigation – data acquisition • Autonomy / Automation • Positioning / Navigation • Adaptive Movement • Offline / Online Teaching Efficiency / Reliability • System Integration • Integration of Navigation and Data Acquisition / Data Management / Data Analysis • NDT tool integration • Integrated probe and control electronics • Integration of Data Acquisition / Data Management - Navigation • Robustness (wear, pressure, radiation hard) Data Acquisition /Data Management /Data Analysis • Robustness • Temperature • Immersion (HydroCarbons, Water etc.) • Application Integration • System integration ( watch, clean, measure, grab / repair) Competences for ITER
Core CompetencesTechnology • Miniaturisation of NDT • eddycurrentelectronics • IC design, Magnetic cameras • Improvedprobability of detection for surface breaking cracks & near surface defects (fatigue, welds) • Harshenvironmentincluding radiation hard • Integration in inspection systems & robotics • + Magneticfieldsensors & position sensors (APS, proximity) Competences for ITER
Innovation in Robotics Highly compact versatile inspection robot • Mobility • free movement on complex shaped surfaces • right a away turn • obstacle handling • climbing over steps / edges • Navigation • 3D camera • navigation support • position estimation • measure • object recognition • Autonomy: line following • following a drawn line • following an edge • following a weld seem
Innovation in Robotics In Situ Generator Inspection • AirGapCrawler is moving in between the air gap of rotor and stator • The rotor can remain in stator! • Inspection: Watch, Short-Circuit
Scanner for deeppenetration NDT in tubineblades Depth between probe and notch bottom (mm) 2.0 2.5 1.5 1 0.5 Ribs 0.5mm 2.5mm 8 Competences for ITER
Example: Generator and Turbine Bore Scanner System with ultrasonic module System in deployment housing Highly compact on-site non-destructive assessment (ultrasonic, eddy current, video) of bores with / without tapers Rotor Counter-bore shoulder Alstom Inspection Robotics - Company / Products / Technology
Core Competences and Technology • Design of systems (electronics, mechanics, optics) for harsh environments (temperature, vacuum, vibrations, radiations) • Miniaturization • End-to-end development with system approach • Operation in harsh environment • Experience of space programs (demanding and challenging, tight on schedules, product assurance / quality assurance, etc.) • Specific process technology (highly integrated electronics) Competences for ITER
Background • Assessment and test of new technologies for space exploration • Development of imaging systems for planetary missions • Control and processing units • Development of electronics for space missions • R&D activities on micro-cameras based systems • Space missions: • Mars: ExoMars(ESA), Mars Science Laboratory – MSL (NASA), MarsExpress/Beagle2 (ESA) • Moon: SMART-1 (ESA) • Earth Observation: TARANIS (CNES), PROBA-2 (ESA), PROBA (ESA) • Mercury: BepiColombo(ESA) • Comet: Rosetta (ESA) • Astrophysics: ASTRO-H (JAXA) • International Space station: Andromede(CNES) Competences for ITER
New generation micro-camera • Highly miniaturized • Low power (< 1W) • Low mass (< 120g) • Proven and mastered technology • Specific sensor hardening technique for enhanced radiation tolerance • Generic and modular • Potential application for ITER for inspection, monitoring, etc. Competences for ITER
Photogrammetry System • "Canister-free" Photogrammetry used in the LSS of ESA to perform measurements of mechanical deformations of test articles due to temperature in combination with vacuum conditions • Based on micro-cameras working in harshenvironment • Potential application for deformationmeasurements for ITER Competences for ITER
Contact ALSTOM Inspection Robotics LtdTechnoparkstrasse 18005 Zurich, SwitzerlandPhone +41 44 275 25 75 contact@inspection-robotics.com www.inspection-robotics.com Sensima Inspection 31 ave du Mont Blanc CH-1196 Gland, SwitzerlandPhone +41 22 364 49 20 Bernard.revaz@sensima.ch www.sensimainsp.com Micro-Cameras & Space Exploration SA Puits-Godet 10a CH-2000 Neuchâtel, Switzerland Phone: +41 32 566 76 70 stephane.beauvivre@microcameras.ch www.microcameras.ch Competences for ITER