Download
1 / 56
560 likes | 717 Views
Computing a Path subject to Multiple Constraints: Advances and Challenges. Guoliang (Larry) Xue Faculty of Computer Science and Engineering School of Computing, Informatics and Decision Systems Engineering Fulton Schools of Engineering Arizona State University. Outline/Progress of the Talk.

E N D
Computing a Path subject to Multiple Constraints: Advances and Challenges Guoliang (Larry) Xue Faculty of Computer Science and Engineering School of Computing, Informatics and Decision Systems Engineering Fulton Schools of Engineering Arizona State University
Outline/Progress of the Talk • Problem Definitions • Related Works • Fast and Simple Approximation Algorithms • The 1st K-approximation algorithm, scaled max-norm • A class of K-approximation algorithms, a norm approach • Greedy is good, another K-approximation algorithm • Numerical results • Faster Approximation Schemes • Pseudo-polynomial time algorithms • Scaling, rounding, and approximate testing • Improved approximation schemes • Numerical results • Conclusions
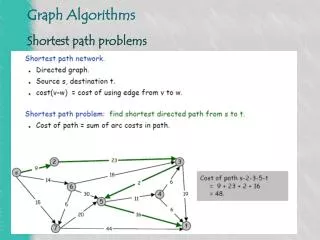
Problem Definitions • Given a network where each link e has a cost c(e) and a delay d(e), we are interested in finding a source-destination path whose cost is within a given cost tolerance C and whose delay is within a given delay tolerance D. • This problem is NP-hard. There are many heuristic algorithms which have no performance guarantee, and sophisticated approximation schemes which are too complicated for protocol implementation. • We have designed very simple hop-by-hop routing algorithmsthat have good performance guarantees, as well asfaster approximation schemes.
Problem Definitions • We study the general problem where there are K QoS parameters, for any constant K≥2. • We are given an undirected graph G(V, E) where each edge eE is associated with K nonnegative weights 1(e), 2(e), …, K(e). We are also given a source node s and destination node t, along with K positive constants W1, …, WK. • The multi-constrained QoS routing problem asks for an s—t path p such that k(p) ≤ Wk, for k=1, 2, …, K, where k(p)=ep k(e). • For simplicity, we will use K=2 for most part of this talk. In this case, we will talk about cost and delay.
Illustration of the Problem (C=W1, D=W2) (2, 5) s x (12, 20) K = 2 W1 = 16, W2 = 8 (12, 5) (14, 1) (2, 2) y z (10, 0) The shortest path with regard to the 1st edge weight is (s, z) The shortest path with regard to the 2nd edge weight is (s, y, z) Neither of them is a feasible solution ! Path (s, x, y, z) is a feasible path.
Outline/Progress of the Talk • Problem Definitions • Related Works • Fast and Simple Approximation Algorithms • The 1st K-approximation algorithm, scaled max-norm • A class of K-approximation algorithms, a norm approach • Greedy is good, another K-approximation algorithm • Numerical results • Faster Approximation Schemes • Pseudo-polynomial time algorithms • Scaling, rounding, and approximate testing • Improved approximation schemes • Numerical results • Conclusions
Related Works • J.M. Jaffe, Algorithms for finding paths with multiple constraints, Networks, 1984. • S. Chen and K. Nahrstedt, On finding multi-constrained paths, ICC, 1998. • X. Yuan, Heuristic algorithms for multiconstrained quality of service routing, TNET, 2002. • R. Hassin, Approximation schemes for the restricted shortest path problems, Mathematics of Operations Research, 1992. • D.H. Lorenz and D. Raz, A simple efficient approximation scheme for the restricted shortest path problem, Operations Research Letters, 2001. • G. Xue, A. Sen, W. Zhang, J. Tang, K. Thulasiraman; Finding a path subject to many additive QoS constraints; TNET, 2007. • G. Xue, W. Zhang, J. Tang, K. Thulasiraman; Polynomial time approximation algorithms for multi-constrained QoS routing; TNET, 2008. • G. Xue and W. Zhang; Multiconstrained QoS routing: Greedy is Good; Globecom’2007.
Related Works • G. Xue; Minimum cost QoS multicast and unicast routing in communication networks; IPCCC’2000/TCOM2003. • A. Junttner et al., Lagrange relaxation based method for the QoS routing problems, INFOCOM 2001. • A. Goel et al., Efficient computation of delay-sensitive routes from one source to all destinations, INFOCOM 2001. • T. Korkmaz and M. Krunz, A randomized algorithm for finding a path subject to multiple QoS requirements, COMNET, 2001. • P. Van Mieghem et al., Concepts of exact QoS routing algorithms, TNET, 2004. • F.A. Kuipers et al., A comparison of exact and eps-approximation algorithms for constrained routing, NETWORKING, 2006. • A. Orda and A. Sprintson., Efficient algorithms for computing disjoint QoS paths, INFOCOM, 2004.
Outline/Progress of the Talk • Problem Definitions • Related Works • Fast and Simple Approximation Algorithms • The 1st K-approximation algorithm, scaled max-norm • A class of K-approximation algorithms, a norm approach • Greedy is good, another K-approximation algorithm • Numerical results • Faster Approximation Schemes • Pseudo-polynomial time algorithms • Scaling, rounding, and approximate testing • Improved approximation schemes • Numerical results • Conclusions
A Simple/Novel Idea for SMCP • The decision problem is to find a path p such that c(p)<=C and d(p)<=D. • The optimization problem is to find a path p such that max {c(p)/C, d(p)/D} is minimized. • Define l(p) = max {c(p)/C, d(p)/D} as a new path length. • The original problem has a feasible solution if and only if there is a path p such that l(p)<=1. • The optimization problem is NP-hard as well. • The Idea: For each link e, define a new link weightw(e) = max{c(e)/C, d(e)/D}. • The shortest path with respect to w(e) can be computed easily, and is within a factor of 2 from the optimal solution.
Illustration of the Concepts (C=W1, D=W2) (2, 5) s x (12, 20) K = 2 W1 = 16, W2 = 8 (12, 5) (14, 1) (2, 2) y z (10, 0) The shortest path with regard to the 1st edge weight is (s, z), l(p)=20/8. The shortest path with regard to the 2nd edge weight is (s, y, z), l(p)=11/8. Neither of them is a feasible/optimal solution ! The optimal path is (s, x, y, z), l(p)=7/8
A Simple 2-Approximation Algorithm (2, 5) (2/16, 5/8) 5/8 s x (12, 20) 20/8 K = 2 W1 = 16, W2 = 8 (12, 5) 12/16 (14, 1) 14/16 2/8 (2, 2) y z (10, 0) 10/16 The shortest path with regard to the new edge weight is (s, y, z) whose path length is 11/8. This path has a length that is guaranteed to be within a factor of 2 from the optimal value. In this case, we have 11/8 ≤ 2×7/8.
The General K-Approximation Alg for SMCP • There have been many heuristic algorithms for the problem. • Our results, shows that many of these heuristic algorithms actually have guaranteed performance.
A Better Greedy 2-Approximation Algorithm A path from s to x with path weights [2/16, 5/8] is stored at node x. The path length is 5/8 The path at node x is chosen because it has the minimum path length [0,0] [2/16, 5/8] (2, 5) s x K = 2 W1 = 16, W2 = 8 (12, 20) (12, 5) (14, 1) (2, 2) The optimal solution is (s, x, y, z) with path length 7/8 y z (10, 0) [12/16, 5/8] [22/16, 5/8] [12/16, 20/8] [4/16, 7/8] [16/16, 6/8] The path at node y is chosen because it has the minimum path length among the unmarked nodes The path found by Greedy is (s, x, z) with path length 1
Numerical Results • Algorithms compared • Greedy • Previously best known K-approximation algorithm • FPTAS for the OMCP problem • K = 3, W = W1 = W2 = W3 • Networks • well-known Internet topologies • ArpaNet (20 nodes and 32 edges) and ItalianNET (33 nodes, 67 edges) • randomly generated topologies • BRITE [BRITE] • Waxman model [WaxJSAC88] , and have the default parameters set by BRITE • the edge weights were uniformly generated in a given range (we used the range [1,10]). • Three scenarios • Infeasible W = 5 • Tight W = 10 • Loose W = 20 (ε = 0.1) [BRITE] BRITE; http://www.cs.bu.edu/brite/. [WaxJSAC88] B.M. Waxman; Routing of multipoint connections; IEEE Journal on Selected Areas in Communications; Vol. (1988).
On ArpaNet Topology The number of better paths: path p1 is better than path p2 if l(p1) < l(p2) For any path p, its relative error is calculated as (l(p) - l(pSMCP))/ l(pSMCP) , where pSMCP is the path found by SMCP for the source-destination pair.
On Large Random Network Topologies Scalability of the algorithms, eps=0.5. 80x314, 210x474, 140x560, 160x634. Path quality, eps = 0.1, 100 nodes, 390 links.
Outline/Progress of the Talk • Problem Definitions • Related Works • Fast and Simple Approximation Algorithms • The 1st K-approximation algorithm, scaled max-norm • A class of K-approximation algorithms, a norm approach • Greedy is good, another K-approximation algorithm • Numerical results • Faster Approximation Schemes • Pseudo-polynomial time algorithms • Scaling, rounding, and approximate testing • Improved approximation schemes • Numerical results • Conclusions
Pesudo-Poly Time Algs for MCPP and MCPN • MCPP can be solved in O(mCK-1) time, taking advantage of properties of directed acyclic graphs. • MCPN can be solved in O((m+nlogn)C) time, with a novel application of Dijkstra’s algorithm.
Summary of Results • For DCLC, we have improved the state of the art from O(mnloglogn+mn/) time FPTAS to O(mnlogloglogn+mn/) time FPTAS. This is of theoretical value, approaching the conjecture of O(mn/) time FPTAS. • For SMCP, we have designed the first FPTAS, with a time complexity of O(m(n/)K-1). • For OMCP, we have designed the first FTPAS, with a time complexity of O(mnlogloglogn+m(n/)K-1). • For SMCP, we have also designed a class of very simple K-approximation algorithms, with time complexity of O(m+nlogn).