Download
1 / 103
1.03k likes | 1.44k Views
IAIP Week 2 Search I: Uninformed and Adversarial Search. Last Week. AI overview Agent Architectures. Hey days many “cognitive” tasks “solved” AI close to cognitive science. Subfields founded: Planning Vision Constraint Satisfaction. First industrial applications: Expert systems Neural nets.

E N D
Last Week • AI overview • Agent Architectures Hey daysmany “cognitive” tasks “solved”AI close to cognitive science Subfields founded:Planning VisionConstraint Satisfaction First industrial applications:Expert systemsNeural nets Machine learning Agents Widespread application Maturing field 60 70 80 90 00 RMJ VeCoS ITU
This Week: Search I • Uninformed search [9:00-9:50, 10-10:50, 11-?] • State spaces • Search trees • General tree search • BFS, Uniform cost search, DFS, DLS, IDS, bidirectional search • General graph search • Adversarial search [?-11:50] • Game trees • Minimax • Alpha-beta pruning RMJ VeCoS ITU
Uninformed searchRN Chapter 3 (Except 3.6) RMJ VeCoS ITU
Search as a problem solving technique • Search is a last resort, if we have an analytical solution, we should apply it. Ex. • find minima of f(x,y) = x2 + y2 – x for -1 ≤x≤ 1 and -1 ≤y≤ 1 • Solve an instance of Rubiks cube • What can we learn from humans? RMJ VeCoS ITU
Problem-space theory [Newell & Simon 72] • People’s problem solving behavior can be viewed as the production of knowledge states by the application of mental operators, moving from an initial state to a goal state • Operators encode legal moves • For a given problem there are a large number of alternative paths from initial state to goal state; the total set of such states is called a basic problem space RMJ VeCoS ITU
Missionaries and Cannibals Problem • Task: Transfer 3 missionaries and 3 cannibals across a river in a boat • Max 2 people in the boat at any time • Someone must always accompany the boat to the other side • At any time there can not be more cannibals than missionaries left on one bank MMMCCC river RMJ VeCoS ITU
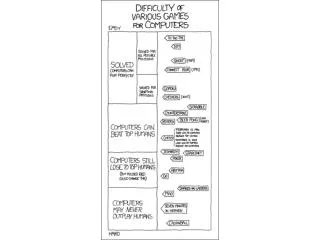
Source: Eysenck & Kean 90 RMJ VeCoS ITU
Hard: many options Hard: moving away from goal state Source: Eysenck & Kean 90 RMJ VeCoS ITU
Domain Independent Heuristics • Means-end analysis • note the difference between the current state and the goal state; • create a sub-goal to reduce this difference; • Select an operator that will solve this sub-goal(continue recursively) • Anti-looping AI exploits such heuristics in automated problem solving RMJ VeCoS ITU
Informed and Uninformed search • Uninformed search algorithms (the topic of this week): • Are only given the problem definition as input • Informed search algorithms (the topic of next week): • Are given information about the problem in addition to its definition (typical an estimate of the distance to a goal state) RMJ VeCoS ITU
Search Problem Definition • A search problem consists of: • An initial states0 • A successor functionSUCCESSOR-FN(S) that for a state s returns a set of action-state pairs <a,s’> where a is applicable in s and s’ is reached from s by applying a • A goal testG(s) that returns true iff s is a goal state • A step cost functionc(s,a,s’) that returns the step cost of taking action a to go from state s to state s’. (must be additive to define path cost) • A solution is a path from the initial state s0 to a goal stateg • An optimal solution is a solution with minimum path cost 1+2 form a state space RMJ VeCoS ITU
Search Problem Definition • How can we define the state space as a graph G = (V,E)? • Why not use an explicitly defined search graph as input to the algorithms? RMJ VeCoS ITU
Search Problem Definition • Notice • For most problems, the size of the state space grows exponentially with the size of the problem (e.g., with the number of objects that can be manipulated) • For these problems, it is intractable to compute an explicit graph representation of the search space • For that reason search-spaces are defined implicitly in AI. • Further, the complexity of an AI algorithm is normally given in terms of the size problem description rather than the size of the search space RMJ VeCoS ITU
Selecting a state space 1) Choose abstraction • Real world is absurdly complex • state space must be abstracted for problem solving • (Abstract) state = set of real states • (Abstract) action = complex combination of real actions • e.g., "Arad Zerind" represents a complex set of possible routes, detours, rest stops, etc. • For guaranteed realizability of actions, any real state "in Arad“ must get to some real state "in Zerind" • (Abstract) solution = • set of real paths that are solutions in the real world • Each abstract action should be "easier" than the original problem 2) Define the elements of the search problem RMJ VeCoS ITU
Ex: Romania Route Planning RMJ VeCoS ITU
Ex: Romania Route Planning • Initial state: e.g., s0 = "at Arad" • Goal test function:G(s) : s= "at Bucharest" • Successor function: SUCCESSOR-FN(Arad) = {<Arad Zerind, Zerind>, <Arad Timisoara,Timisoara>, … } • Size of state space: 20 • Edge cost function: • E.g., c(s,a,s’) = dist(s,s’) RMJ VeCoS ITU
Ex: Missionaries and Cannibals • Initial state? • Goal test function? • Successor function definition? • Size of state space? • Cost function? MMMCCC river RMJ VeCoS ITU
Ex: Missionaries and Cannibals MMMCCC river MMMCCC river CC MCCC river Sail(M,M) Sail(C,C) MM Sail(M) Sail(C) Sail(M,C) MMCCC river M MMMCCC river MC MMMCCC river C RMJ VeCoS ITU
Ex: Missionaries and Cannibals • Initial state: <[{M,M,M,C,C,C,B},{}]> • Goal test function:G(s) : • Successor function: • Actions: Sail(M,M), Sail(M,C), Sail(C,C), Sail(M), Sail(C) • SUCCESSOR-FN(S) is defined by the rules: • Max 2 people in the boat at any time • Someone must always accompany the boat to the other side • At any time there can not be more cannibals than missionaries left on one bank • Size of state space: 42*2 = 32 (but only some of these are reachable) • Cost function: we want solutions with minimum # of steps, so c(s,a,s’) = 1 RMJ VeCoS ITU
Ex: 8-puzzle • Initial state? • Goal test function? • Successor function definition? • Size of state space? • Cost function? 1 2 3 4 5 6 7 8 1 RMJ VeCoS ITU
Ex: 8-puzzle 1 2 3 1 2 3 Up Down 4 2 6 4 8 5 6 7 8 5 7 5 1 2 3 4 5 6 7 8 5 1 2 3 1 2 3 4 6 4 6 Left Right 7 8 5 7 8 5 RMJ VeCoS ITU
Ex: 8-puzzle • Initial state: Any reachable state • Goal test function: s = <1,2,3,4,5,6,8,*> • Actions set: {Up, Down, Left, Right} • Successor function: • Given by the rules: 1: Up (Down): applicable if some tile t above (below) * 2: Left (Right): applicable if some tile t left (right) side of * 3: The effect of actions is to swap t and * • Size of state space: 9!/2 • Cost function: c(s,a,s’) = 1 RMJ VeCoS ITU
Ex: 8-puzzle Q: why is the size of the state-space 9!/2 and not 9! ? A: Only half of the possible configurations can reach the goal state • If the tiles are read from top to bottom, left to right, they form a permutation • e.g. the permutation of the state below is <1,2,3,4,5,7,8,6> 1 2 3 4 5 7 8 6 RMJ VeCoS ITU
Ex: 8-puzzle • Inversion: a pair of numbers contained in the permutation, for which the bigger one is before the smaller one • Number of inversions in <1,2,3,4,5,7,8,6>: 7 • A permutation with an even (odd) number is called an even permutation (odd permutation)[or it said to have even (odd) parity] RMJ VeCoS ITU
Ex: 8-puzzle • The actions in the 8-puzzle preserves the parity of the permutation • Left, right: obvious, no changes • Down (Up): tile moved 2 positions to the right (left) in the permutation: • both, smaller or larger: # of inversions increased or decreased with 2 • one is smaller and one is larger: # of inversions is unchanged <A,B,C,D,E,F,G,H> RMJ VeCoS ITU
Ex: 4-queens • Initial state? • Goal test function? • Successor function definition? • Size of state space? • Cost function? Q Q Q Q RMJ VeCoS ITU
Ex: 4-queens • Initial state: no queens on the board • Goal test function: All queens on the board, none can attack each other • Successor function: add a queen to an empty square • Size of state space: 16*15*14*13 / 4! = 1820 • Cost function: irrelevant! Can we do better? RMJ VeCoS ITU
Tree Search Algorithms • Basic idea: • Assumes the state-space forms a tree (otherwise already-explored states may be regenerated) • Builds a search tree from the initial state and the successor function RMJ VeCoS ITU
Tree search ex.: 4-queens • A state is given by the assignment of 4 variables r1, r2, r3, and r4 denoting the row number of 4 queens placed in column 1 to 4 • ri = 0 indicates that no column number has been assigned to queen i(e.g., queen i has not been placed on the board yet) • The queens are assigned in order r1 to r4 RMJ VeCoS ITU
Tree search ex.: 4-queens Initial state s0: root of the search tree [0,0,0,0] Search fringeor frontieror open list RMJ VeCoS ITU
Tree search ex.: 4-queens Expansion of [0,0,0,0] [0,0,0,0] [1,0,0,0] [2,0,0,0] [3,0,0,0] [4,0,0,0] Children of [0,0,0,0] The given search strategy chooses this leaf node on the fringe to expand next RMJ VeCoS ITU
Tree search ex.: 4-queens Expansion of [2,0,0,0] [0,0,0,0] [1,0,0,0] [2,0,0,0] [3,0,0,0] [4,0,0,0] [2,1,0,0] [2,2,0,0] [2,3,0,0] [2,4,0,0] Etc… RMJ VeCoS ITU
Tree search ex.: 4-queens Expansion of [2,0,0,0]Forward checking [0,0,0,0] [1,0,0,0] [2,0,0,0] [3,0,0,0] [4,0,0,0] X X X X X [2,1,0,0] [2,2,0,0] [2,3,0,0] [2,4,0,0] X Q X Etc… Q RMJ VeCoS ITU
Tree search ex.: Routing RMJ VeCoS ITU
Tree search ex.: Routing RMJ VeCoS ITU
Tree search ex.: Routing RMJ VeCoS ITU
Implementation: general tree search RMJ VeCoS ITU
States versus Nodes • A state is a (representation of) a physical configuration • A node is a data structure constituting part of a search tree includes state, parentnode, action, path costg(s), depth • The Expand function creates new nodes, filling in the various fields and using the SuccessorFn of the problem to create the corresponding states RMJ VeCoS ITU
Search strategies • A search strategy is defined by picking the order of node expansion (=sorting criteria of the fringe priority queue) • Strategies are evaluated along the following dimensions: • completeness: does it always find a solution if one exists? • time complexity: number of nodes generated • space complexity: maximum number of nodes in memory • optimality: does it always find a least-cost solution? What about soundness of a strategy? • Time and space complexity are measured in terms of • b: maximum branching factor of the search tree • d: depth of the least-cost solution • m: maximum depth of the state space (may be infinite) RMJ VeCoS ITU
Uninformed search strategies • Uninformed search strategies use only the information available in the problem definition • Breadth-first search (BFS) • Uniform-cost search • Depth-first search (DFS) • Backtracking search • Depth-limited search (DLS) • Iterative deepening search (IDS) • Bidirectional search RMJ VeCoS ITU
Breadth-first search • Expand shallowest unexpanded node • Implementation: • fringe is a FIFO queue, i.e., new successors go at end RMJ VeCoS ITU
Breadth-first search • Expand shallowest unexpanded node • Implementation: • fringe is a FIFO queue, i.e., new successors go at end RMJ VeCoS ITU
Breadth-first search • Expand shallowest unexpanded node • Implementation: • fringe is a FIFO queue, i.e., new successors go at end RMJ VeCoS ITU
Breadth-first search • Expand shallowest unexpanded node • Implementation: • fringe is a FIFO queue, i.e., new successors go at end RMJ VeCoS ITU
Properties of breadth-first search • Complete? • Time? • Space? • Optimal? RMJ VeCoS ITU
Properties of breadth-first search b0 … b1 … bd … … … bd+1-b RMJ VeCoS ITU
Properties of breadth-first search • Complete?Yes (if b is finite) • Time?1+b+b2+b3+… +bd + b(bd-1) = (1-bd+2)/(1-b) – b = O(bd+1) • Space?O(bd+1) (keeps every node in memory) • Optimal? Yes (if cost = 1 per step), all nodes at depth i will be expanded before nodes at depth i+1, so an optimal solution will not be overlooked. • Space is the bigger problem (more than time) RMJ VeCoS ITU
Uniform-cost search • Expand least-cost unexpanded node • Implementation: • fringe = queue ordered by increasing path cost • Equivalent to breadth-first if step costs all equal RMJ VeCoS ITU
Uniform-cost search g=0 75 140 118 g=140 g=118 g=75 RMJ VeCoS ITU