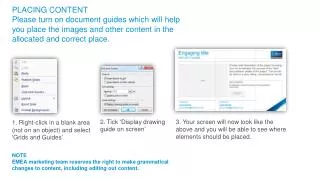
Download
1 / 36
360 likes | 497 Views
Placing Controllers in a System. Overview of Class So Far…. General Introduction Deregulation Traditional approaches to control Static devices. Type of problems. Steady State Transient Stability Inter-Area Oscillations Subsynchronous Resonance Voltage Stability. Introduction to FACTS.

E N D
Overview of Class So Far… • General Introduction • Deregulation • Traditional approaches to control • Static devices
Type of problems • Steady State • Transient Stability • Inter-Area Oscillations • Subsynchronous Resonance • Voltage Stability
Introduction to FACTS • Detailed analysis of devices • Thyristor controlled inductor • SVC • Statcom • TCSC
System Modeling • Simplified models for use in system simulations and analysis • Statcom • TCSC (see Reference [1]) • UPFC
Set up system equations to include FACTS devices • Get block diagrams or differential equations for device • Define device states • Define device inputs • Express device model in terms of existing system states & device states • Augment system equations
OK, Say you work at an ISO & are in charge of ensuring system reliability. You've had 5 major blackouts in the last 3 years that have involved the propagation of problems from one part of the system to another. The utility members are convinced that the addition of a FACTS device or two will solve the problems & they even agree to pay!
Now what do you do? . . . • Brainstorming Activity: • What things do you need to worry about? • Break into groups of 2 or 3 • Take 3 minutes & write down as many things as you can • No criticism allowed, Go for variety, Go for quantity not quality
Questions: • Where do I put it? Controller Location • What should it do? Controller Function
Things to consider: • More than one problem • More than one system condition • More than one mode • More than one tool
Problems • Steady State • Insure operating point is within acceptable limits • Interarea Oscillations • Damp eigenvalues
Transient Stability • Provide sufficient synchronizing and damping torque • Subsynchronous Resonance • Avoid resonance frequencies • Voltage Stability • Stabilize eigenvalues and avoid bifurcations
Interarea Oscillation Mitigation • Analysis Tools (Mostly Linear) • Controllability and Observability • Participations • Sensitivities • Power Oscillation Flows
Linearized System x’ = Ax + Bu y = Cx + Du • Eigenvalues are li, i = 1, nstates • Right Eigenvectors ri , R is matrix of ri's • Left Eigenvectors (rows) li, L is matrix of li's • L = R-1
Perform variable transformation to Jordan Form • x = Rz (Inverse transform z = Lx) • Substituting into system equations . . . Rz’ = AR z + B u y = CR z + Du
Multiply through by L = R-1 LRz’ = z’ = LAR z + LB u y = CR z + Du
Controllability and Observability • Modal controllability matrix = LB • tells how strongly connected the inputs (u's) are to each of the modes • Modal observability matrix = CR • tells how well we can measure or "see" each mode in the outputs (y's)
Participations • Connection strengths between modes and states • General participation • pi hk = rih lhk • link between ith (obs.) & kth (con.) states through mode h • Participation Factors • pih = rih lhi • link between mode h & state i
Eigenvalue Sensitivities li’ = dli/dp • p some parameter of the system • Tells how easily we can move an eigenvalue by changing a parameter • In general, li' = li A' ri
Sensitivities are also related to participations • pihk = lh’ for p = aki (element of A) • pih = lh’ for p = akk (diagonal element) xi x(t) u(t) rest of system xk p
Sensitivity with Controllers • The "Hybrid System"
The Power System x’ = Ax + Bu y = Cx • assume no direct connection between y & y2 • The controller transfer functionF(s,p) is the only place p shows up
Sensitivity for Hybrid System • li’ = dli/dp = li B {d/dp [F(s,p)]|s=li } C ri • related to the controllability and observability measures and to the controller transfer function (see Reference [5])
Uses of Sensitivities • Location of controllers • Magnitude of l’ tells the displacement of the eigenvalue if gain is equal to 1 • Large magnitude indicates controller is a good candidate for improving a mode • Phase l’ of gives the direction of the eigenvalue's displacement in the imaginary plane
Introduce devices likely to influence these characteristics • Simulations and Trial & Error
Tuning of a controller . . . • Adjust the phase compensation of the controller so that l’ has a phase of 180 degrees with controller in place • Adjust the gain of the controller to achieve the desired amount of damping
Power Oscillation Flows • Map where oscillations caused by a single eigenvalue appear in the system n x(t) = S ck elkt rk k = 1 • ck is the initial condition in Jordan Space
The idea is to choose ck's so that only one mode is perturbed, i.e. ci = 1 and ck= 0 for all k not equal i then x(t) = ri elit • this solution can then be propagated through the system equations to find the power flow on key lines (or some other variable for that matter)
Placing a FACTS device using participations, sensitivities, etc. • Simple & Fast • Detailed & More Accurate
Transient Stability and FACTS • Usually concerned with providing adequate damping and synchronizing torque • Often design using linear techniques and test with the nonlinear system
Nonlinear Methods • Normal forms of vector fields for extending the linear concepts to the nonlinear regions. • Second-order oscillations, participations, controllability & observability
Energy Methods • Lyapunov-based methods for determining stability indices • Tracking of energy exchanges during a disturbance
Control Strategy • Determine weak points in system • Poorly damped oscillations • Lack of synchronizing torque • Large power swings • Large energy exchanges • Short critical clearing times • Multi-machine instabilities
[1] Paserba, J. J., N. W. Miller, E. V. Larsen, and R. J. Piwko "A Thyristor Controlled Series Compensation Model for Power System Stability Analysis" IEEE Trans. on Power Delivery, Vol. 10?, (July 1994): 1471-1478. [2] Chan, S. M. "Modal Controllability and Observability of Power-System Models" International Journal of Electric Power and Energy Systems, Vol. 6, No. 2, (April 1994): 83-89. [3] Rouco, L., and F. L. Pagola "An Eigenvalue Sensitivity Approach to Location and Controller Design of Controllable Series Capacitors for Damping Power System Oscillations" IEEE-PES 1997 Winter Power Meeting, Paper No. PE-547-PWRS-0-01-1997. References
[4] Ooi, B. T., M. Kazerani, R. Marceau, Z. Wolanski, F. D. Galiana, D. McGillis, and G. Joos "Mid-Point SIting of FACTS Devices in Transimssion Lines" IEEE-PES 1997 Winter Power Meeting, Paper No. PE-292-PWRD-0-01-1997. [5] Pagola, F. L., I. J. Perez-Arriaga, and G.C. Verghese "On Sensitivities, Residues, and Participations: Application to Oscillatory Stability Analysis and Control" IEEE Trans. on Power Systems, Vol. 4, No. 2, (February 1989): 278-285. [6] Messina, A. R., J. M. Ramirez, and J. M. Canedo C. "An Investigation on the use of Power Systme Stabilizers for Damping Inter-Area Oscillations in Longitudinal Power Systems" IEEE-PES 1997 Winter Power Meeting, Paper No. PE-492-PWRS-0-01-1997. [7] Zhou, E. Z. "Power Oscillation Flow Study of Electric Power Systems" International Journal of Electric Power and Energy Systems, Vol. 17, No. 2, (1995): 143-150.