Download
1 / 30
310 likes | 331 Views
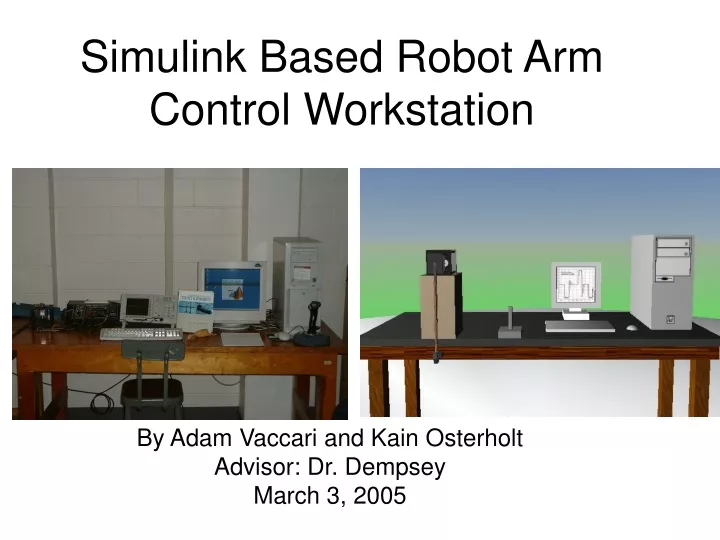
Simulink Based Robot Arm Control Workstation. By Adam Vaccari and Kain Osterholt Advisor: Dr. Dempsey March 3, 2005. Presentation Outline. Introduction SimMechanics Plant Model Force Feedback Virtual Reality Schedule. Introduction. Goals Model Robot Arm in SimMechanics Toolbox

E N D
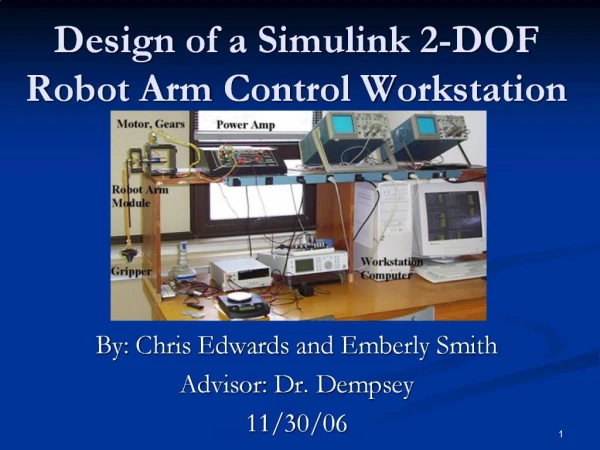
Simulink Based Robot Arm Control Workstation By Adam Vaccari and Kain Osterholt Advisor: Dr. Dempsey March 3, 2005
Presentation Outline • Introduction • SimMechanics Plant Model • Force Feedback • Virtual Reality • Schedule
Introduction • Goals • Model Robot Arm in SimMechanics Toolbox • Design Closed Loop Controllers • Implement Force Feedback Joystick Control • Real Time Visualization using the VR Toolbox
Plant Model Kt – DC motor torque constant Kv – DC motor back EMF constant
Plant Model Kt – DC motor torque constant Kv – DC motor back EMF constant
Model Evaluation Compare SimMechanics Model vs. Actual System • Arm Suspended at Angle Ө then Dropped • Measured Settling Time • (Time taken to reach 2% of Final Value) Ө
Model Evaluation Results for Drop From 30 degrees: Ts = 1.59 sec Experimental SimMechanics
SimMechanics Model Gain * Values taken as angle approaches 90 degrees
Force Feedback Joystick • Logitech Wingman Strike Force3D Force Feedback Joystick • Send command inputs to robot arm • Provide feedback about environment arm is operating in
Simple Application • Inverted Pendulum • Objective: Keep Arm Upright • Joystick Applies Torque • Feedback Force Proportional to Ө Ө
Future Applications • Feedback Torque Due to Load • More resistance to movement as load increases • Training Program • Uses force feedback to “guide” joystick to correct position
Virtual Reality VRML Tree