Download
1 / 29
310 likes | 721 Views
ENCODER. ENCODER. อุปกรณ์ป้อนกลับ (Feedback Device). นิยมเรียกว่า “เอนโค้ด เดอร์ (Encoder) ” องค์ประกอบสำคัญในระบบขับเคลื่อน ระบบขับเคลื่อน เซอร์ โวมอเตอร์ ระบบ ขับเคลื่อนไฟฟ้าแบบเอซี (Close loop). ENCODER. หน้าที่ของ Encoder. ตรวจวัดความเร็วรอบ (Speed)

E N D
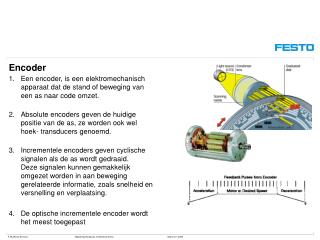
ENCODER อุปกรณ์ป้อนกลับ (Feedback Device) • นิยมเรียกว่า “เอนโค้ดเดอร์(Encoder)” • องค์ประกอบสำคัญในระบบขับเคลื่อน • ระบบขับเคลื่อนเซอร์โวมอเตอร์ • ระบบขับเคลื่อนไฟฟ้าแบบเอซี (Close loop)
ENCODER หน้าที่ของ Encoder • ตรวจวัดความเร็วรอบ (Speed) • ทิศทางการหมุนของมอเตอร์ (Direction of Rotation) • ตำแหน่ง / มุมของการหมุน • จำนวนรอบของการหมุน
ENCODER ชนิดของ Encoder • แยกประเภทได้ 2 กลุ่ม • ทำงานด้วยหลักการเหนี่ยวนำ / Analog Encoder • ทำงานด้วยหลักการดิจิตอล / Digital Encoder
ENCODER Analog Encoder • เทคโคเจนเนอเรเตอร์(Tacho Generator) • รีโซลเวอร์(Resolver)
ENCODER Tacho Generator • เจนเนอเรเตอร์ขนาดเล็ก • แปลงความเร็วรอบมาเป็นแรงดันไฟฟ้า • สำหรับควบคุม 0 – 10 v. • เพื่อป้อนกลับไปยังชุดไดรฟ์ • นิยมใช้ในระบบดีซีไดรฟ์
ENCODER Resolver • ใช้งานมากในระบบเซอร์โว • มีความแข็งแรง / ทนทาน • ทนต่อสภาพแวดล้อมอุตสาหกรรมได้ดี • ลักษณะคล้ายหม้อแปลงตัวเล็ก • อาจเรียกว่า “Rotary Transformer”
ENCODER Resolver
ENCODER โครงสร้าง/การทำงานของ Resolver • ลักษณะคล้ายกับมีหม้อแปลง 2 ชุด • ชุดแรกรับสัญญาณอ้างอิง ความถี่สูงย่าน 2 – 10 kHz • เพื่อสร้างแรงเคลื่อนเหนี่ยวนำให้ • เกิดกระแสไหลไปสร้างสนามแม่เหล็กให้กับขดลวดชุดที่สอง • มีขดลวดปฐมภูมิที่ติดกับโรเตอร์1 ชุด • มีขดลวดทุติยภูมิ 2 ชุด วางทำมุมกัน 90 องศา • เรียกว่า ขดลวด sine และ cosine
ENCODER โครงสร้าง/การทำงานของ Resolver (ต่อ) • สัญญาณทั้งสองจะถูกป้อนกลับคอนโทรลเลอร์ • แปลงสัญญาณเป็นสัญญาณดิจิตอล • โดย Resolver-to-digital convertor (RDC) • มีจำนวนช่วง 1,000 – 4,000 พัลส์ ต่อการหมุน 1 รอบ
ENCODER Digital Encoder • Incremental Encoder • Absolute Encoder
ENCODER ส่วนประกอบเบื้องต้น Digital Encoder
ENCODER ส่วนประกอบเบื้องต้น Digital Encoder • เพลา (Shaft) ใช้สำหรับต่อเข้ากับวัตถุที่หมุน • แผ่นดิสก์ (Code หรือ Pulse Disc) • เป็นแผ่นที่มีแทร็กทั้งส่วนที่โปร่งแสงและทึบแสง • เพื่อให้แสง LED ผ่านได้ • Photodetectorใช้รับแสงเพื่อแปลงเป็นรหัสข้อมูล
ENCODER หลักการทำงานของ Digital Encoder • แสง LED จะส่องผ่านเลนส์ (Convex lens) • ปรับโฟกัสให้ลำแสงขนานกัน • ให้ลำแสงส่องผ่านแทร็กหรือร่องเล็กๆ บน Disc
ENCODER Incremental Encoder • แสงที่ผ่าน Disc จะแยกเป็น 2 ส่วน • มีเฟสต่างกันอยู่ 90 องศา • เรียกแสงเดิมว่าเฟส A และลำแสงใหม่ว่า เฟส B • แสงนี้จะส่องผ่านไปที่ Photo didode2 ตัว • แปลงสัญญาณที่ได้รับนี้เป็น Square wave • สามารถต่อเข้ากับ PLC และเคาท์เตอร์ • เพื่อแสดงตำแน่ง / ความเร็ว / ทิศทาง / จำนวนรอบ • ค่าข้อมูลจะสูญหายเมื่อไฟดับ
ENCODER สัญญาณ Incremental Encoder
ENCODER สัญญาณ Incremental Encoder
ENCODER Absolute Encoder • ใช้เทคโนโลยีสูงกว่า • ไม่ได้มีแค่ track โปร่งแสงกับทึบแสง • มีร่องหลายแถวที่ใช้แทนค่าโค้ดไบนารี่ • แต่ละแถวแทนโค้ดไบนารี่ 1 บิต • แต่ละช่องที่โปร่งแสงกับทึบแสงจะแสดง ON/OFF • แต่ละแถวจะทำงานเหมือน Incremental แต่เป็นอิสระตากกัน • ให้สัญญาณเป็นโค้ดไบนารี่สำหรับแต่ละองศา • ค่าข้อมูลไม่สูญหายเมื่อไฟดับ
ENCODER Absolute Encoder
ENCODER Absolute Encoder
ENCODER เลขไบนารี่สำหรับ Absolute Encoder • เลขไบนารี่ที่ใช้ มีอยู่ 2 แบบ คือ • รหัสไบนารี่ (Binary code) • รหัสเกรย์(Gray codeX
ENCODER Binary code • ใช้รหัสไบนารี่แทนตำแหน่งของเพลาที่หมุน 360 องศา • จำนวน sector = • แต่ละ sector จะเป็นช่วงละ
ENCODER Binary code • Example : Encoder 3 bits
ENCODER Binary code
ENCODER ข้อเสียของ Binary code • การเปลี่ยนแต่ละ sector สัญญาณเปลี่ยนแปลงมากกว่า 1 ช่อง • หากมีสัญญาณรบกวนหรือสายหายค่าตำแหน่งจะต่างกันมาก • จึงไม่เป็นที่นิยม • เช่น encoder อยู่ที่ 011(3) มีสัญญาณรบกวนที่บิต 2 • encoder จะแสดง 111(7) หรือ
ENCODER ตัวอย่าง • เช่น encoder อยู่ที่ 011 มีค่าเป็น 3 • มีสัญญาณรบกวนที่บิต2 ให้ส่งค่า ON • encoder จะแสดง 111 ซึ่งมีค่าเป็น 7 • ค่าที่อ่านได้จะแตกต่างมากเกินไป • ไม่สามรถนำไปใช้งานได้ • อาจก่อให้เกิดข้อผิดพลาดมาก
ENCODER ตัวอย่าง • พิจารณา • เลข 3 = 011 • เลข 4 = 100 • เลขเปลี่ยนค่าเดียว แต่เลขไบนารี่เปลี่ยนทั้งสามหลัก • ไม่สามารถทำให้คอนโทรเลอร์ตรวจสอบได้เมื่อมีเลขผิดปกติ
ENCODER Gray code • หลักการทำงานเหมือนกันกับ Icremental • แก้ไขการแสดงค่าโดยใช้ Gray code • รหัสตำแหน่งที่เพิ่มขึ้นหรือลดลง • ค่าบิตจะเปลี่ยนแปลงเพียงบิตเดียว
ENCODER Gray code