Download
1 / 1

E N D
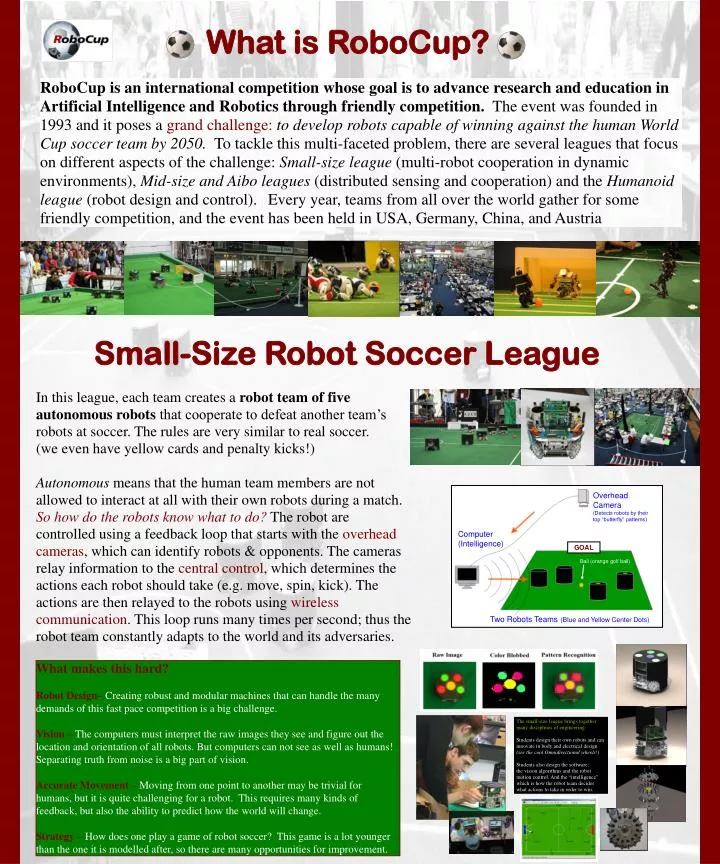
What is RoboCup? RoboCup is an international competition whose goal is to advance research and education in Artificial Intelligence and Robotics through friendly competition. The event was founded in 1993 and it poses a grand challenge: to develop robots capable of winning against the human World Cup soccer team by 2050. To tackle this multi-faceted problem, there are several leagues that focus on different aspects of the challenge: Small-size league (multi-robot cooperation in dynamic environments), Mid-size and Aibo leagues (distributed sensing and cooperation) and the Humanoid league (robot design and control). Every year, teams from all over the world gather for some friendly competition, and the event has been held in USA, Germany, China, and Austria Small-Size Robot Soccer League In this league, each team creates a robot team of five autonomous robots that cooperate to defeat another team’s robots at soccer. The rules are very similar to real soccer. (we even have yellow cards and penalty kicks!) Autonomous means that the human team members are not allowed to interact at all with their own robots during a match. So how do the robots know what to do? The robot are controlled using a feedback loop that starts with the overhead cameras, which can identify robots & opponents. The cameras relay information to the central control, which determines the actions each robot should take (e.g. move, spin, kick). The actions are then relayed to the robots using wireless communication. This loop runs many times per second; thus the robot team constantly adapts to the world and its adversaries. Overhead Camera (Detects robots by their top “butterfly” patterns) Computer (Intelligence) GOAL Ball (orange golf ball) Two Robots Teams(Blue and Yellow Center Dots) What makes this hard? Robot Design– Creating robust and modular machines that can handle the many demands of this fast pace competition is a big challenge. Vision – The computers must interpret the raw images they see and figure out the location and orientation of all robots. But computers can not see as well as humans! Separating truth from noise is a big part of vision. Accurate Movement – Moving from one point to another may be trivial for humans, but it is quite challenging for a robot. This requires many kinds of feedback, but also the ability to predict how the world will change. Strategy – How does one play a game of robot soccer? This game is a lot younger than the one it is modelled after, so there are many opportunities for improvement. The small-size league brings together many disciplines of engineering: Students design their own robots and can innovate in body and electrical design (see the cool Omnidirectional wheels!) Students also design the software: the vision algorithms and the robot motion control. And the “intelligence” which is how the robot team decides what actions to take in order to win.