Download
1 / 23
230 likes | 360 Views
Multiprocessor Scheduling. Integrating List Heuristics into genetic Algorithms for Multiprocessor Scheduling [1]. May, 22 2006 Stefan Hüttenrauch. Roadmap. Part I – Introduction The problem to be solved Heuristics in general Genetic algorithms List heuristics

E N D
Multiprocessor Scheduling Integrating List Heuristics into genetic Algorithms for Multiprocessor Scheduling [1] May, 22 2006 Stefan Hüttenrauch
Roadmap • Part I – Introduction • The problem to be solved • Heuristics in general • Genetic algorithms • List heuristics • Part II – Integrating list heuristics into genetic algorithms • One genetic algorithm in detail • Integrating a list heuristic • Results and comparisons Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Part I – Introduction The problem to be solved Heuristics in general Genetic algorithms (GA) List heuristics (LH)
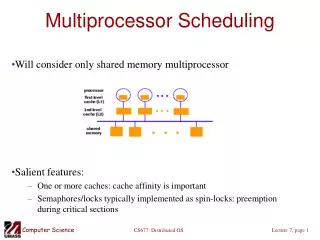
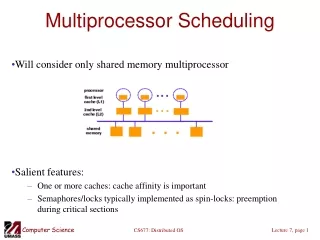
Introduction – The Problem to be solved • Computer with a set P of m processors • Set T of n tasks with precedence order • Schedule S assigns tasks to processors in a specific order • Goal: find schedule with smallest makespan feasible schedule for m=2 acyclic digraph Refs: [1][3] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Heuristics in general • Consistent algorithms for optimization problems • Has strategy of searching in set of all feasible solutions • No guarantee for optimal solution • Examples: • Generic algorithms (meta heuristics) • List heuristics Refs: [4] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Heuristics in general – Genetic Algorithms • History • Developed by John H. Holland in mid-1960’s • Imitate nature’s evolution processes • Comparison to trad. optimization methods • Explore greater range of possible solutions • Use probabilistic transition rules • Disadvantages • Finding the best solution is not necessarily given Refs: [1][2][3] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Heuristics in general – Genetic Algorithms cond. • Genetic Algorithms consists of: • String representation (genes) • Initial population • Fitness function • Genetic operators and a stochastic assignment Refs: [1][3] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Heuristics in general – List Heuristics • In contrast to GA: • Schedule is build step by step • Use knowledge about the problem and about what happened in the steps before to find better solution • One example is the “critical path/most immediate successors first” (CP/MISF) list heuristic Refs: [1][5] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Part II – Integrating list heuristics into genetic algorithms One genetic algorithm in detail Integrating a list heuristic Results and comparisons
One GA Details – String Representation • Individual: set s of m strings for m processors • String: ordered set of tasks scheduled to Pj • Precedence relations among tasks satisfied • Every task is present && appears only ones one individual s1 s2 Refs: [1][3] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
One GA Details – initial Population • How to define feasible individuals • Define height-ordering on task set T in each string sj:height(th) ≤ height(ti) with th and ti in sj && h < i • Only a necessary condition may not find optimal schedule • How to define that ordering height(ti) random with plp(ti) < height(ti) < pls(ti) plp(ti)… max path length between t1 and immediate predecessor of ti pls(ti)… max path length between t1 and immediate successor of ti Refs: [1][3] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
One GA Details – initial Population cond. • Algorithm to create initial population • Compute height for every task in task graph TG • Separate tasks according to their height (set G(h)) • For all m-1 processors do 4. • Form schedule for a processor • For every G(hi) in G(h) create random number r with 0 ≤ r ≤ |G(hi)| • Pick r tasks of G(hi) assigning them to current processor • Delete assigned tasks from G(hi) • Assign remaining tasks to the last processor Refs: [1][3] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
One GA Details – Fitness Function • For evaluation of search nodes (individuals) • Controls genetic operators • Here: finishing time FT of a schedule S FT(S) = max ftp(Pj) for all j in {0, 1,…, m} ftp(Pj)… finishing time of last task in Pj m… number of processors Refs: [1][3] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Genetic Algorithms – genetic Operators • Reproduction • Clone individuals and assign them to new population • Do it (number of individuals in population) times • Clone individual with highest fitness value • Crossover • Partition of strings • Pair-wise exchange of parts of the strings • Do it (number of individuals in population) / 2 times • Mutation • Random alternation of a string with small probability • Exchange two tasks with same height within one string • Do it (number of individuals in population) times Refs: [1][3] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
One GA Details – genetic Operators – Animation Population 1 Population 1 Population 1 Population 2 • Population size = 10, max. number of iterations = 1500 • Reproduction • One crossover (5 times, with probability propCros = 1) • One mutation (10 times, with probability propMut = 0.05) • Replace individual with smallest fitness value Multiprocessor Scheduling Prof. Dr. Lars Lundberg
One GA Details – Problems • Initial population • In average pi has more tasks than pi+1 • No uniform distribution due to initial population generation scheme. • Crossover • Some feasible solution cannot be generated • Derives from height-ordering Refs: [1] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Integrating a List Heuristic – initial Population • Basis also a task digraph • Iterative method • Determine free tasks • Randomly choose one and assign it to a free processor • Tasks not necessarily in height-order Refs: [1] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Integrating a List Heuristic – Crossover • Determine partitions V1 and V2 • Remember the genetic algorithm decision based on heights of tasks • Now take a digraph with dependencies from original tasks digraph and the two schedules and a nice algorithm • Perform the crossover • V1 remains the same in s1 and s1’ as in GA • For V2 use CP/MISF list heuristic • Choose task with smallest introduction date first (CP) • If several possibilities choose task with more successors (MISF) Refs: [1][5] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Integrating a List Heuristic – Mutation • Also choose one individual (as in GA) • Sort the tasks according to their precedence constraints • Take task with smallest introduction date • Also use CP/MISF • assign it to a randomly chosen processor Refs: [1] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Results and Comparisons • Better initial population • Shorter makespan better quality of solutions • But: longer execution time Refs: [1] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Results and Comparisons cond. 16 processors Refs: [1] Multiprocessor Scheduling Prof. Dr. Lars Lundberg
Integrating List Heuristics intogenetic Algorithms forMultiprocessor Scheduling [1] I thank you for your attention ¿ Questions ? stefan.huettenrauch@hpi.uni-potsdam.de
References [1] R.C. Corrêa, A. Ferreira, and P. Rebreyend. Integration list heuristics into genetic algorithms for multiprocessor scheduling. 8th IEEE Symposium on Parallel and Distributed Processing , 1996. [2] John H. Holland. Genetic Algorithms. http://www.econ.iastate.edu/tesfatsi/holland.GAIntro.htm, April 2006. [3] E. Hou, N. Ansari, and H. Ren. A genetic algorithm for multiprocessor Scheduling. IEEE Transactions on Parallel and Distributed Systems, 5(2):113-120, Feb. 1994. [4] J. Hromkomvič. Algorithmics for Hard Problems. Springer Verlag, 2001. [5] A. Doboli, P. Eles. Scheduling under Data and Control Dependencies for Heterogeneous Architectures. ICCD '98: Proceedings of the International Conference on Computer Design, 1998. Multiprocessor Scheduling Prof. Dr. Lars Lundberg