Download
1 / 1
10 likes | 124 Views
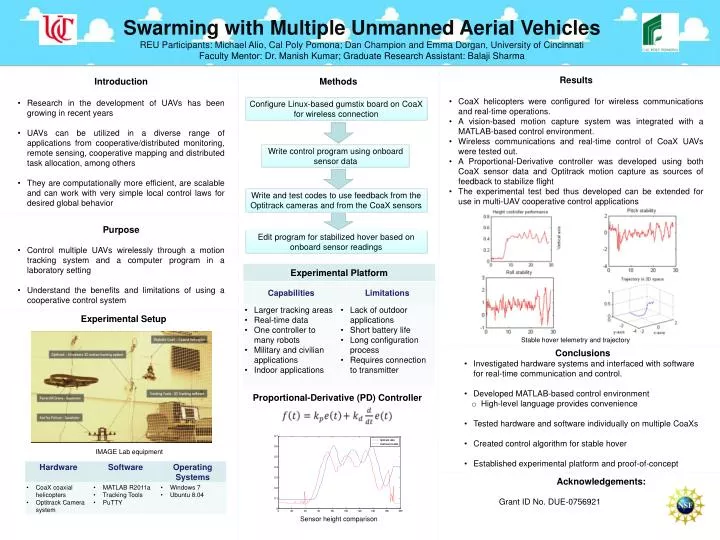
Swarming with Multiple Unmanned Aerial Vehicles REU Participants: Michael Alio , Cal Poly Pomona; Dan Champion and Emma Dorgan, University of Cincinnati Faculty Mentor : Dr. Manish Kumar; Graduate Research Assistant: Balaji Sharma. Methods. Results

E N D
Swarming with Multiple Unmanned Aerial Vehicles REU Participants: Michael Alio, Cal Poly Pomona; Dan Champion and Emma Dorgan, University of Cincinnati Faculty Mentor: Dr. Manish Kumar; Graduate Research Assistant: Balaji Sharma Methods • Results • CoaX helicopters were configured for wireless communications and real-time operations. • A vision-based motion capture system was integrated with a MATLAB-based control environment. • Wireless communications and real-time control of CoaX UAVs were tested out. • A Proportional-Derivative controller was developed using both CoaX sensor data and Optitrack motion capture as sources of feedback to stabilize flight • The experimental test bed thus developed can be extended for use in multi-UAV cooperative control applications • Introduction • Research in the development of UAVs has been growing in recent years • UAVs can be utilized in a diverse range of applications from cooperative/distributed monitoring, remote sensing, cooperative mapping and distributed task allocation, among others • They are computationally more efficient, are scalable and can work with very simple local control laws for desired global behavior Configure Linux-based gumstix board on CoaX for wireless connection Write control program using onboard sensor data Write and test codes to use feedback from the Optitrack cameras and from the CoaX sensors Edit program for stabilized hover based on onboard sensor readings • Purpose • Control multiple UAVs wirelessly through a motion tracking system and a computer program in a laboratory setting • Understand the benefits and limitations of using a cooperative control system Experimental Setup Stable hover telemetry and trajectory • Conclusions • Investigated hardware systems and interfaced with software for real-time communication and control. • Developed MATLAB-based control environment • High-level language provides convenience • Tested hardware and software individually on multiple CoaXs • Created control algorithm for stable hover • Established experimental platform and proof-of-concept Proportional-Derivative (PD) Controller IMAGE Lab equipment Acknowledgements: Grant ID No. DUE-0756921 Sensor height comparison