Download
1 / 58
600 likes | 1.16k Views
Chapter 5 Simultaneous Linear Equations. Many engineering and scientific problems can be formulated in terms of systems of simultaneous linear equations.

E N D
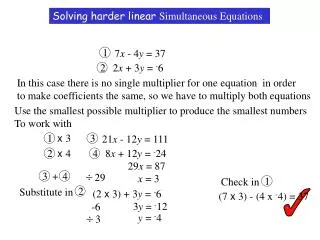
Chapter 5 Simultaneous Linear Equations • Many engineering and scientific problems can be formulated in terms of systems of simultaneous linear equations. • In a system consisting of only a few equations, a solution can be found analytically using the standard methods from algebra, such as substitution.
Example: Electrical Circuit Analysis Kirchhoff’s law I: current R: resistance V: voltage
Assume R1=2, R2=4, R3=5, V1=6, and V2=2. We get the following system of three linear simultaneous equations. The solution to these three equations produces the current flows in the network.
General Form for a System of Equations aij : known coefficient Xj : unknown variable Ci : known contant • Assume # of unknowns = # of equations • Assume the equations are linearly independent; that is, any one equation is not a linear combination of any of the other equations.
The linear system can be written in a matrix-vector form: Combining A and C, it can be expressed as:
Solution of Two Equations It can be solved by substitution. With substitution, we get
Classification of Systems of Equations • Systems that have unique solutions
A system that has a solution, but has ill-conditioned parameters.
Permissible Operations • Rule 1: The solution is not changed if the order of the equations is changed.
Rule 2: Any one of the equations can be multiplied or divided by a nonzero constant without changing the solution. • Rule3: The solution is not changed if two equations are added together and the resulting equation replaces either of the two original equations.
Gaussian Elimination • Gaussian elimination procedure: Phase 1: forward pass Phase 2: back substitution • The the forward pass is to apply the three permissible operations to transform the original matrix to an upper-triangular matrix:
Written in terms of individual equations: • Back substitution:
Example: Gaussian Elimination Procedure Represented in the matrix form:
As the step 1 in the forward pass, we will convert the element a11 (a11 is called the pivot for row 1) to 1 and eliminate, that is set to zero, all the other elements in the first column.
Step 2: • Step 3:
Step 4: It represents:
Step 1 of backward substitution: • Step 2:
Step 3: • The solution is: X1 = 1, X2 = 2, X3 = 3, X4 = 4
Gauss-Jordan Elimination • The Gaussian elimination procedure requires a forward pass to transform the coefficient matrix into an upper-triangle form. • In Gauss-Jordan elimination, all coefficients in a column except for the pivot element are eliminated. • In Gauss-Jordan elimination, the solution is obtained directly after the forward pass; there is no back substitution phase. • The Gauss-Jordan method needs more computational effort than Gaussian elimination.
Example: Gauss-Jordan Elimination • Step1: • Step 2:
Step 3: • Step 4:
Accumulated Round-off Errors • Problems with round-off and truncation are most likely to occur when the coefficients in the equations differ by several orders of magnitude. • Round-off problems can be reduced by rearranging the equations such that the largest coefficient in each equation is placed on the principal diagonal of the matrix. • The equations should be ordered such that the equation having the largest pivot is reduced first, followed by the equation having the next largest, and so on.
Programming Gaussian Elimination • Forward pass: • Loop over each row i, making each row i in turn the pivot row. • Normalize the elements of the pivot row (row i) by dividing each element in the row by aii as follows:
3.Loop over rows( i + 1) to n below the pivot row and reduce the elements in each row as follows: • Back substitution 1. For the last row n: 2. For rows (n-1) through 1,
LU Decomposition • A matrix A can be decomposed into L and U, where L is a lower-triangular matrix and U is a upper-triangular matrix. LU=A
AX=C LUX=C, we have LE=C and UX=E • To calculate LE=C (forward substitution) • To calculate UX=E (back substitution)
Relation between LU Decomposition and Gaussian Elimination • In the LU decomposition, matrix U is equivalent to the upper triangular matrix obtained in the forward pass in Gaussian elimination. • The calculation of UX=E is equivalent to the back substitution in Gaussian elimination.
Example: LU Decompostion Applying LU decomposition:
Thus, the L and U matrices are Forward substitution:
Cholesky Decomposition for Symmetric Matrices • A symmetric matrix A: • Cholesky decomposition for a symmetric matrix A
Example: Cholesky Decomposition We can obtain the following:
Therefore, the L matrix is The validity can be verified as
Iterative Methods • Elimination methods like the Gaussian elimination procedure are often called direct equation-solving methods. An iterative method is a trial-and error procedure. • In iterative methods, we can assume a solution, that is, a set of estimates for the unknowns, and successively refine our estimate of the solution through some set of rules. • A major advantage of iterative methods is that they can be used to solve nonlinear simultaneous equations, a task that is not possible using direct elimination methods.
Jacobi Iteration • Each equation is rearranged to produce an expression for a single unknown.
Example: Jacobi Iteration Rearrange each equation as follows:
Assume an initial estimate for the solution: X1=X2=X3=1. First iteration: Second iteration: The solution is shown in the next table.
Gauss-Seidel Iteration • In the Jacobi iteration procedure, we always complete a full iteration cycle over all the equations before updating our solution estimates. In the Gauss-Seidel iteration procedure, we update each unknown as soon as a new estimate of that unknown is computed. • Example: Gauss-Seidel Iteration
Assume an initial solution estimate of X1=X2=X3=1. First iteration: Second iteration:
Table: Example of Gauss-Seidel Iteration Jocobi iteration method requires 13 iterations to reach the accuracy of 3 decimal places. Gauss-Seidel iteration method needs 7 iterations.
Convergence Considerations of the Iterative Methods • Both the Jacobi and Gauss-Seidel iterative methods may diverge. • Interchange the order of equations in the above example, and solve it by the Gauss-Seidel method:
Table: Divergence of Gauss-Seidel Iteration • The solution in the above table would not converge. That is, we can not get a solution. • The divergence of the iterative calculation does not imply there is no solution, since it is a permissible operation to interchange the order in a set of equations.