Download
1 / 36
400 likes | 677 Views
Chapter 1 - Vibrations. Harmonic Motion/ Circular Motion Simple Harmonic Oscillators Linear, Mass-Spring Systems Initial Conditions Energy of Simple Harmonic Motion Damped Oscillations Driven/Forced Oscillations. Math Prereqs. Identities (see appendix A for more).

E N D
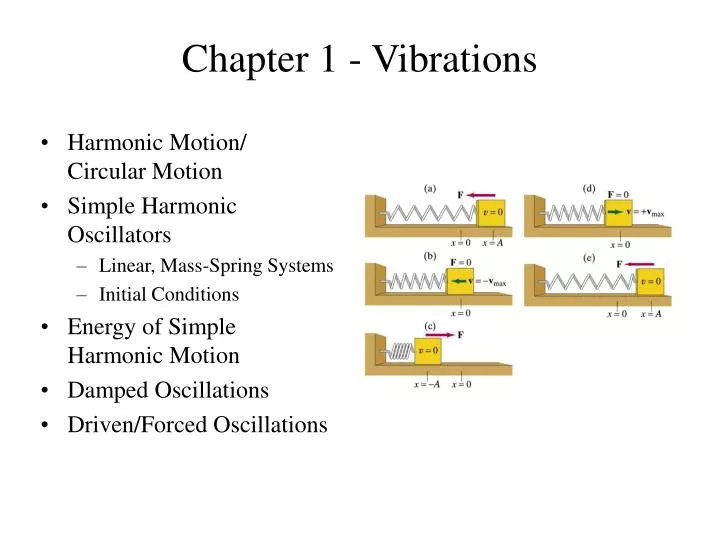
Chapter 1 - Vibrations • Harmonic Motion/ Circular Motion • Simple Harmonic Oscillators • Linear, Mass-Spring Systems • Initial Conditions • Energy of Simple Harmonic Motion • Damped Oscillations • Driven/Forced Oscillations
Why Study Harmonic Motion http://www.falstad.com/mathphysics.html http://www.kettering.edu/~drussell/Demos/waves/wavemotion.html
Math Prereqs Example:
Horizontal mass-spring • Good model! • Force is linear • Mass is constant • Spring has negligible mass • No losses Hooke’s Law: Frictionless (1D constraint)
Solutions to differential equations • Guess a solution • Plug the guess into the differential equation • You will have to take a derivative or two • Check to see if your solution works. • Determine if there are any restrictions (required conditions). • If the guess works, your guess is a solution, but it might not be the only one. • Look at your constants and evaluate them using initial conditions or boundary conditions.
A1 A2 A Any Other Solutions? Or
Definitions • Amplitude - (A) Maximum value of the displacement (radius of circular motion). Determined by initial displacement and velocity. • Angular Frequency (Velocity) - (wo)Time rate of change of the phase. Natural Angular Frequency • Period - (T) Time for a particle/system to complete one cycle. • Frequency - (fo) The number of cycles or oscillations completed in a period of time. Natural Frequency • Phase - (wt + f)Time varying argument of the trigonometric function. • Phase Constant - (f)Initial value of the phase. Determined by initial displacement and velocity.
The constants – Phase Angle Case I: Note phase relationship between x, u, and a Case II:
A1 A2 A General Case
Example • A mass of 200 grams is connected to a light spring that has a spring constant (s) of 5.0 N/m and is free to oscillate on a horizontal, frictionless surface. If the mass is displaced 5.0 cm from the rest position and released from rest find: • a) the period of its motion, • b) the maximum speed and • c) the maximum acceleration of the mass. • d) the total energy • e) the average kinetic energy • f) the average potential energy
Im jb Re a Complex Exponential Solution • Check it – it works and is simpler. • Phase relationships are more obvious. • Implied solution is the real part • Are there enough arbitrary constants? What are they?
Damped Oscillations Dashpot Dissipative forces Equation of Motion: Solution Guess:
Damped frequency oscillation B - Critical damping (=) C - Over damped (>)
Relaxation Time • Decay modulus, decay time, time constant, characteristic time • Time required for the oscillation to decrease to 1/e of its initial value
Forced Vibrations • Transient Solution – decays away with time constant, t • Steady State Solution
Resonance Natural frequency make small!!
Mechanical Input Impedance • Think Ohm’s Law
Significance of Mechanical Impedance • It is the ratio of the complex driving force to the resulting complex speed at the point where the force is applied. • Knowledge of the Mechanical Impedance is equivalent to solving the differential equation. In this case, a particular solution.
s m Rm Electrical Analogs V f
um u f 1/s m Rm How would you electrically model this? s f m Rm u um
Transient Response Which is transient, which is steady state? See front cover and figure 1.8.1 (pg 14)
Instantaneous Power • Think EE
Quality (Q) value • Q describes the sharpness of the resonance peak • Low damping give a large Q • High damping gives a small Q • Q is inversely related to the fraction width of the resonance peak at the half max amplitude point.