Download

1 / 22
230 likes | 408 Views
Iris Recognition Under Various Degradation Models. Hans Christian Sagbakken. Outline. Introduction Scope and research questions Experimental setup Results Conclusions. Introduction. Biometrics technology.

E N D
Iris Recognition Under Various Degradation Models Hans Christian Sagbakken
Outline • Introduction • Scope and research questions • Experimental setup • Results • Conclusions Hans Christian Sagbakken
Introduction Hans Christian Sagbakken
Biometrics technology • Biometrics refers to technologies that measure and analyze human physical and behavioural characteristics • Examples of characteristics include fingerprints, eye retinas and irises, facial patterns and handmeasurements • Two main application: • Verification (mobile banking) • Identification (security control) Hans Christian Sagbakken
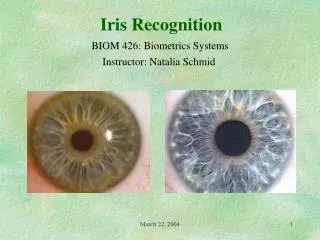
Example of an iris pattern Hans Christian Sagbakken
Iris recognition prosess 1. Segmentation prosess 2. Normalisation prosess 4. Comparison/decision 3. Iris code generation Comparison Hans Christian Sagbakken
Scope and research questions Hans Christian Sagbakken
Research questions • 1. Under which conditions is iris-based recognition feasible? • 2. Which filter to perform under certain degradation conditions? Hans Christian Sagbakken
Scope of the thesis • The thesis was restricted to experiments in MATLAB only • Adapt Libor Masek’s open source code for the experiments (different filters, inter-class and intra-class comparisions) • The iris images degradations are simulated in MATLAB with different parameters (to find the best filter under different conditions) Hans Christian Sagbakken
Experimental setup Hans Christian Sagbakken
Implementation • Expanded Libor Masek’s open source code for iris recognition with four filters • Log-Gabor filter (9600 bit, original filter) • 702-bit Haar wavelet filter • 87-bit Haar wavelet filter • Log of Gaussian filter (9600 bit) • Expanded the search function with inter-class and intra-class comparisons Hans Christian Sagbakken
Iris database • The filters are tested on 500 images from the UBiris database. Five images per person for 100 persons. • The images are simulated with different paramenters • Add noise in the image database (Gaussian noise) • Add blur in the image database • Change the light intensity in the image database • Rotate the images in the database Hans Christian Sagbakken
Evaluation • For each filter under different conditions, the False Acceptance Rate (FAR) and False Rejection Rate (FRR) are computed • Inter-class comparisons (to experiment with FAR). For each test 123,750 comparisons are done • Intra-class comparisons (to experiment with FRR). For each test 1000 comparisons are done • Totally 6,930,000 inter-class and 56,000 intra-class comparisons are performed. Hans Christian Sagbakken
Example of hamming distribution Inter-class comparisons Intra-class comparisons Hans Christian Sagbakken
Example of FAR and FRR Optimal threshold value = 0.32 Hans Christian Sagbakken
Results Hans Christian Sagbakken
Results under noisy conditions Hans Christian Sagbakken
Results under blur conditions Hans Christian Sagbakken
Results under light changes Hans Christian Sagbakken
Results under rotation Hans Christian Sagbakken
Conclusions • Under noisy conditions the best results where achieved with 702-bit Haar wavelet filter • Under blur conditions the best results where achieved with 702-bit Haar wavelet filter • Under light changes the best results where achieved with 702-bit Haar wavelet filter and Log-Gabor filter • Under rotation the best results where achieved with Log-Gabor filter • Totally the best filter is 702-bit Haar wavelet filter Hans Christian Sagbakken
Questions??? Hans Christian Sagbakken