Download
1 / 18
200 likes | 380 Views
Telepresence Robot to Design and development . Adviser : Chao, Chun-Tang Student : Jheng , An- Jhih SN: MA120205. Outline. Abstract Introduction Prior art search Design of Mobile Robot Design of System Socket Agreement Mobile Robot Control Reference. Abstract.

E N D
Telepresence Robot to Design and development Adviser: Chao, Chun-Tang Student : Jheng, An-Jhih SN: MA120205
Outline • Abstract • Introduction • Prior art search • Design of Mobile Robot • Design of System Socket Agreement Mobile Robot Control • Reference
Abstract • 本文介紹了一種遠程視訊通話機器人,由一個遠程用戶控制登入控制,能四處移動與遠端的人們,建立一個行遠程視訊會議,有效地與他人溝通。 • 遠程視訊通話機器人,它們能在日常生活中做各種應用。用於企業、醫院 能開遠程會議,監控內部狀況 或夜間巡邏等任務。博物館、展會重大場等,進行遠端登入參展,增加展會新聞性及曝光度。對於那些生病或有身體殘疾的人,能讓他們與外界接觸,等的生活上應用。
Introduction • 本專題著重於研究,遠程視訊通話機器人的地形適應能力,一般市面上已開發的遠程視訊通話機器人,大多適用場所都是室內,或是地面平整的室外展場。並不適合在室外移動,容易被障礙物卡到, 不小心掉下樓梯摔壞。 • 本專題主要設計用於室外場所。針對的服務客群,對於那些生病、有身體殘疾的人 或 年紀很大的年長者,能讓他們與外界接觸。若有疾病的人不用擔心傳染給他人,或無法走出自己的床 去外面。也可用於室外夜間巡邏任務。
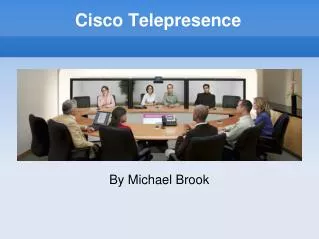
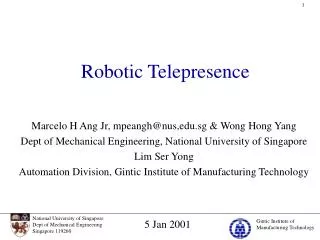
Prior art search(1-1) A REMOTE TELEPRESENCE SYSTEM FOR HIGH SCHOOL CLASSROOMS PEBBLES (Providing Education By Bringing Learning Environments to Students) is a telecommunications system which combines traditional videoconferencing with simple robotics.
Prior art search(1-2) A REMOTE TELEPRESENCE SYSTEM FOR HIGH SCHOOL CLASSROOMS(2005) It allows elementary school aged children who are unable to attend school because of hospitalization or other reasons to establish a presence in their classroom with a remotely controlled videoconferencing robot. Earlier studies have shown that PEBBLES can be successfully integrated into classrooms at the elementary level.
Prior art search(2) Double TelepresenceRobot
Design of Mobile Robot(1) • 本機構平台採用履帶輪設計,此設計相較於前案機構設計,有更強的地形適應能力,活動場所能不會只局限在某平面空間。 • 當然輪式機器人能夠爬的障礙取決於車輪的直徑,同時一 相對較小的履帶機器人具有相同的功能。 • 最大跨越障礙能力,若遇到極大高度落差的地形(如:樓梯),只要履帶輪前方的導引履帶,能勾到障礙物上方就能順利通過障礙。
Design of Mobile Robot(2) • 履帶輪機構最小的長度限制,為了防止履帶輪在爬行時打滑,在爬行障礙物(如:樓梯)時,前方相對位置至少需要能有一點抓地,已帶動整體機構前進,而在後方相對位置也需要有一點固定,不會使機構飄移。 • 以本圖為例,高20CM 寬30CM 樓梯, 所需履帶輪長:
Design of SystemSocket Agreement • 甚麼是Socket? 目前Intemet上最常見的TCP/IP網路協定,能跨多種系統平台, 是程式設計用來進行網路連線的一個普遍元件。 ServerSocket在伺服器端打開端口,不指定其位址,等Client 來連線。 Client 來連線時,會綁定IP及Port,接著等待客戶端的要求。
Design of SystemMobile Robot Control(1-1) • 以Amarino連接Android 與Arduino Amarino (Android meets Arduino) 是 Bonifaz Kaufmann 開發連接 Android 與 Arduino的軟體套件。 跟前一代 Android-Firmata比起來 ,Amarino一樣是走藍芽傳輸, 不一樣的是作者自創一個很簡單 的通訊協定。
Design of SystemMobile Robot Control(1-2) • 以Amarino連接Android 與Arduino 互動應用: Arduino這端的程式要用 MeetAndroid函式庫 Android 這端的程式則要使用 AmarinoLibrary.jar 函式庫 傳輸封包:
Design of SystemMobile Robot Control(2-1) • L298N馬達控制模組 兩組 <1>內含兩個H橋的高電壓 大電流全橋式馬達驅動模組 最大電壓46V、最大電流2A。 <2>可以用來控制兩個直流馬達 及一組步進馬達。
Design of SystemMobile Robot Control(2-2) • 強扭力直流減速馬達 型號 : HN 35GBD 1634T 電壓 : 5-12V 電流 : 65-100 mA 轉速 : 200 rpm
References(1) • Web: Using Android in Industrial Automation → http://android.serverbox.ch/?p=549 • IEEE: [1]Moosavian, S.A.A. ; Semsarilar, H. ; Kalantari, A.“Design and Manufacturing of a Mobile Rescue Robot”、 9-15 Oct. 2006 、 E-ISBN :1-4244-0259-X [2] Yeung, J ;Fels, D.I. “A REMOTE TELEPRESENCE SYSTEM FOR HIGH SCHOOL CLASSROOMS” 、 1-4 May 2005 、 ISSN :0840-7789 [3]Tsui, K.M. ; Norton, A. ; Brooks, D.J. ; McCann, E.“Design and development of two generations of semi-autonomous social telepresencerobots”、 22-23 April 2013 、 ISSN :2325-0526 [4]Do, H.M. ;Mouser, C.J. ; Ye Gu ; WeihuaSheng“An open platform telepresence robot with natural human interface” 、 26-29 May 2013 、 Print ISBN:978-1-4799-0610-9
References(2) • IEEE: [5]Hasegawa, K. ;Nakauchi, Y.“Telepresencerobot conveying pre-motions for avoiding speech collisions in teleconference” 、 26-29 Aug. 2013、 ISSN :1944-9445 [6]Tanaka, F. ;Takahashi, T. ; Matsuzoe, S. ; Tazawa, N.“Child-operated telepresence robot: A field trial connecting classrooms between Australia and Japan” 、 3-7 Nov. 2013、ISSN :2153-0858