Download
1 / 42
430 likes | 576 Views
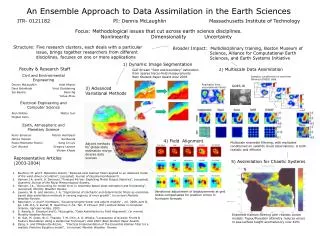
Multiscale Methods of Data Assimilation. INRODUCTION. Achi Brandt The Weizmann Institute of Science UCLA abrandt@math.ucla.edu. EXAMPLE FOR INVERSE PROBLEMS. -----------. PDEs:. Observation Projection. Data Assimilation.

E N D
Multiscale Methods of Data Assimilation INRODUCTION Achi Brandt The Weizmann Institute of Science UCLA abrandt@math.ucla.edu EXAMPLE FOR INVERSE PROBLEMS -----------
PDEs: Observation Projection Data Assimilation Nonlinear Multigrid PDE solver • Nonlinear implicit time steps • Adaptable discretization • Space + time parallel processing One-Shot Solver + Assimilator • Not just initial-condition control • Multiscale observational data • Multiscale covariance matrices • Improved regularization • Continual assimilation
Nonlinear Multigrid PDE solver Nonlinear Multigrid PDE solver Avoid forward extrapolation of nonlinear terms • Nonlinear implicit time steps Unconditional stability of long Rossby waves Cost per time step comparable to explicit step ?? Irad Yavneh and Jim Mcwilliams, 1994, 1995 Shallow water balance equations Ray Bates, Yong Li, Steve McCormick and Achi Brandt, 1995, 2000, 2000 Global shallow water (&3D), semi-Lagrangian advection of potential vorticity
Solving PDE: Influence of pointwise relaxation on the error Error of initial guess Error after 5 relaxation sweeps Error after 10 relaxations Error after 15 relaxations Fast error smoothingslow solution
3 1 correction h LhUh = Fh LU = F 4 2 interpolation of changes 2h L2hU2h = F2h Fine-to-coarse defect correction Truncation error estimator 4h L4hU4h = F4h
h 2h . . . h0/4 h0/2 h0 * * * * interpolation (order l+p) to a new grid interpolation (order m) of corrections residual transfer enough sweeps or direct solver relaxation sweeps * algebraic error < truncation error Full MultiGrid (FMG) algorithm
h 2h . . . h0/4 h0/2 h0 * * * * interpolation (order l+p) to a new grid interpolation (order m) of corrections residual transfer enough sweeps or direct solver relaxation sweeps * algebraic error < truncation error residual transfer no relaxation F cycle
Multigrid solversCost: 25-100 operations per unknown Linear scalar elliptic equation (~1971)
Multigrid solversCost: 25-100 operations per unknown Linear scalar elliptic equation (~1971)* Nonlinear Grid adaptation General boundaries, BCs* Discontinuous coefficients Disordered: coefficients, grid (FE) AMG Several coupled PDEs* (1980) Non-elliptic: high-Reynolds flow Highly indefinite: waves Many eigenfunctions (N) Near zero modes Gauge topology: Dirac eq. Inverse problems Optimal design Integral equations Statistical mechanics Massive parallel processing *Rigorous quantitative analysis (1986) (1977,1982) FAS (1975) Withinonesolver
Multigrid solversCost: 25-100 operations per unknown Linear scalar elliptic equation (~1971)* Nonlinear Grid adaptation General boundaries, BCs* Discontinuous coefficients Disordered: coefficients, grid (FE) AMG Several coupled PDEs* (1980) Non-elliptic: high-Reynolds flow Highly indefinite: waves Many eigenfunctions (N) Near zero modes Gauge topology: Dirac eq. Inverse problems Optimal design Integral equations Statistical mechanics Massive parallel processing *Rigorous quantitative analysis (1986) (1977,1982) FAS (1975) Withinonesolver
Multigrid solversCost: 25-100 operations per unknown Linear scalar elliptic equation (~1971)* Nonlinear Grid adaptation General boundaries, BCs* Discontinuous coefficients Disordered: coefficients, grid (FE) AMG Several coupled PDEs* (1980) Non-elliptic: high-Reynolds flow Highly indefinite: waves Many eigenfunctions (N) Near zero modes Gauge topology: Dirac eq. Inverse problems Optimal design Integral equations Statistical mechanics Massive parallel processing *Rigorous quantitative analysis (1986) (1977,1982) FAS (1975) Withinonesolver
Multigrid solversCost: 25-100 operations per unknown Linear scalar elliptic equation (~1971)* Nonlinear Grid adaptation General boundaries, BCs* Discontinuous coefficients Disordered: coefficients, grid (FE) AMG Several coupled PDEs* (1980) Non-elliptic: high-Reynolds flow Highly indefinite: waves Many eigenfunctions (N) Near zero modes Gauge topology: Dirac eq. Inverse problems Optimal design Integral equations Statistical mechanics Massive parallel processing *Rigorous quantitative analysis (1986) (1977,1982) FAS (1975) Withinonesolver
Generally: LU=F Non-local part of U has the form m Σ Ar(x) φr(x) r = 1 L φr ≈ 0 Ar(x) smooth {φr } found by local processing Ar represented on a coarser grid m coarser grids
Multigrid solversCost: 25-100 operations per unknown Linear scalar elliptic equation (~1971)* Nonlinear Grid adaptation General boundaries, BCs* Discontinuous coefficients Disordered: coefficients, grid (FE) AMG Several coupled PDEs* (1980) Non-elliptic: high-Reynolds flow Highly indefinite: waves Many eigenfunctions (N) Near zero modes Gauge topology: Dirac eq. Inverse problems Optimal design Integral equationsFull matrix Statistical mechanics Massive parallel processing *Rigorous quantitative analysis (1986) (1977,1982) FAS (1975) Withinonesolver
Multigrid solversCost: 25-100 operations per unknown Linear scalar elliptic equation (~1971)* Nonlinear Grid adaptation General boundaries, BCs* Discontinuous coefficients Disordered: coefficients, grid (FE) AMG Several coupled PDEs* (1980) Non-elliptic: high-Reynolds flow Highly indefinite: waves Many eigenfunctions (N) Near zero modes Gauge topology: Dirac eq. Inverse problems Optimal design Integral equations Statistical mechanics Massive parallel processing *Rigorous quantitative analysis (1986) (1977,1982) FAS (1975) Withinonesolver
correction • Each level correct the equations of the next coarser level ( ) • Same fast solver Local patches of finer grids • Possibly once for all corrections • Each patch may use different coordinate system and anisotropic grid and differet physics • Each patch may use different coordinate system and anisotropic grid anddifferent physics; e.g. Atomistic
Nonlinear Multigrid PDE solver • Parallel processing across space + time • Nonlinear implicit time steps
Nonlinear Multigrid PDE solver Natural self adaptation criteria based on local size of • Parallel processing across space + time • Nonlinear implicit time steps • Adaptable discretization Local refinements in space + time Uniform discretization stencils enabling efficient high order Coarser levels extending farther
4D Multigrid Solver + Data Assimilation • Not just initial-condition control • Correlations extending far in time
PDEs: Observation projection Residuals: Derivations: Observation Discretized: vectors Control to minimize positive definite covariance matrices : discretization errors + modeling error estimates : measurement + representativeness errors Full-Control Data Assimilation
4D Full-Control Data Assimilation • Not just initial-condition control • Correlations extending far in time • COST = ??
is asymptotically smooth is local on scale Fast multigrid inversion of Multiscale organization of observational data Oct trees Level-by-level coarsening (FAS interpolation) Replacing dense observation by weighted averages (reduced errors) Multiscale representation of covariance
One-Shot Multigrid solution + assimilation Multigrid solver for the PDEs incorporating adjustments for the control
h 2h . . . h0/4 h0/2 h0 * * * * interpolation (order l+p) to a new grid interpolation (order m) of corrections residual transfer enough sweeps or direct solver relaxation sweeps * algebraic error < truncation error residual transfer no relaxation F cycle
Relaxation of the Control k-th step:
approximately local, calculated locally calculated to best reduce E Complemented by changes at coarser levels Relaxation of the Control k-th step: Not done at the finest PDE levels
One-Shot 4D solution + assimilation Multigrid solver for the PDEs incorporating adjustments for the control • Large-scale assimilation - at coarse levels • Local deviations processed locally • Multiscale windows advanced in time
As far as extend on that coarse scale, hence extending only locally on that scale Still fully accurate (frozen ) One-Shot 4D solution + assimilation Multigrid solver for the PDEs incorporating adjustments for the control • Large-scale assimilation - at coarse levels • Local deviations processed locally • Multiscale windows advanced in time • Coarse levels extending far in time • Further grid adaptation in space+time For fronts, orography, human interest… • COST = O( # discrete variables )
At the finest flow levels: No relaxation of the control is interpolated from coarser levels 4D Full-Control Data Assimilation • Not just initial-condition control • Correlations extending far in time • COST = ?? • COST comparable to the direct solver
Rima Gandlin: Comparing full-flow control with initial-value control SIMPLE MODEL:1D + time WAVE EQUATION (1) in (2) (3) (4) The model(c, p, u0, g) only partly and approximately known, but instead given . measurements . For example, let u0 be unknown and c known only approximately.. Find u in
Initial control vs. Residual control Exact solution: u(x,t) = eiωxcos(ωt) Discretization and algebraic errors (phase errors) Ak = cos(kωδt), ω = 10, h = 0.1, δt = 0.01 Noised data Ak = cos(kωδt) + r, r(-0.5,0.5) × 0.1 or 0.3 ω=10, h=0.1, δt=0.1
Initial control vs. Residual control Exact solution: u(x,t) = eiωxcos(ωt) Modeling error c = 1.1 or 1.2, ω = 10, h = 0.1, δt = 0.01 phase error + noised data + modeling error: ω = 10, h = 0.1, δt = 0.1
Improved Regularization • Scale-dependent regularization • Natural to multiscale solvers Reduced noise at coarse levels Scale-dependent statistical theories of the atmosphere Scale dependent data types • Fine scale fluctuations -- Coarse scale amplitudes
correction Fast continual assimilation of new data • Just local re-processing at each level Multiscale statistical ensembles • Few local ensemble • Ensembles of fine-to-coarse • Fine-to-Coarse correction to covariance W Multiscale attractors
PDEs: Observation Projection Data Assimilation Nonlinear Multigrid PDE solver • Nonlinear implicit time steps • Adaptable discretization • Space + time parallel processing One-Shot Solver + Assimilator • Not just initial-condition control • Multiscale observational data • Multiscale covariance matrices • Improved regularization • Continuous assimilation