Download
1 / 10
100 likes | 104 Views
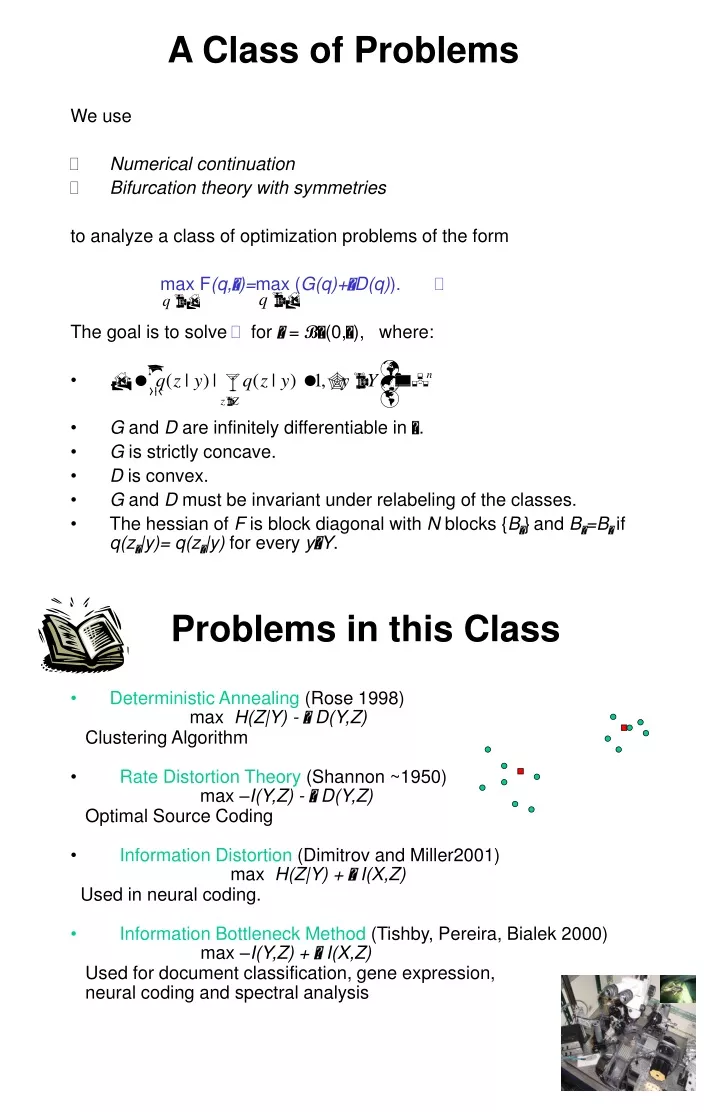
A Class of Problems. We use Numerical continuation Bifurcation theory with symmetries to analyze a class of optimization problems of the form max F (q, )= max ( G(q)+ D(q) ). The goal is to solve for = B (0,), where: .

E N D
A Class of Problems We use • Numerical continuation • Bifurcation theory with symmetries to analyze a class of optimization problems of the form max F(q,)=max (G(q)+D(q)). The goal is to solve for = B(0,), where: • . • G and D are infinitely differentiable in . • G is strictly concave. • D is convex. • G and D must beinvariant under relabeling of the classes. • The hessian of F is block diagonal with N blocks {B}and B=B if q(z|y)= q(z|y) for every yY. Problems in this Class • Deterministic Annealing (Rose 1998) max H(Z|Y) - D(Y,Z) Clustering Algorithm • Rate Distortion Theory (Shannon ~1950) max –I(Y,Z) - D(Y,Z) Optimal Source Coding • Information Distortion (Dimitrov and Miller2001) max H(Z|Y) + I(X,Z) Used in neural coding. • Information Bottleneck Method(Tishby, Pereira, Bialek 2000)max –I(Y,Z) + I(X,Z) Used for document classification, gene expression, neural coding and spectral analysis
p(X) 1 2 3 4 Y X Z is a representation of X using N symbols (or clusters) X 2H(Y) output sequences 2I(X,Y) distinguishable input/output classes of (x,y) pairs Size of an input/output class: 2(H(X|Y) + H(Y|X)) pairs 2H(X) input sequences clustered outputs input source output source Y Z X P(Y |X) q*(Z|Y) Q*(Z |X) Rate Distortion How well is the source X represented by Z? Information Distortion A good communication system has p(X,Y) like: • Goal: Determine the input/output classes of (x,y) pairs. • Idea: We seek to quantize (X,Y) into clusterswhich correspond with the input/output classes. • Method: We determine a quantizer, Q*, between X and Z, a representation of Y using N elements, such that F(Q*,B)is a maximum for some B (0,).
Some nice properties of the problem • The feasible region , a product of simplices, is nice. • Lemma is the convex hull of vertices (). • The optimal quantizer q* is DETERMINISTIC. • Theorem Theextrema of lie generically on the vertices of .. • Corollary The optimal quantizer is invariant to small perturbations in the model. Solution of the problem when p(X,Y):= 4 gaussian blobs p(X,Y) I(X,Z) vs. N
The Dynamical System • Goal: To efficiently solve maxq (G(q) + D(q))for each , incremented in sufficiently small steps, as B. • Method: Study the equilibria of the of the flow • • The Jacobian wrt q of the K constraints {zq(z|y)-1}is J = (IK IK … IK). • The first equilibrium is q*(0 = 0) 1/N. • . determines stability and location of • bifurcation. • Assumptions: • Let q*be a local solution to andfixed by SM . • Call the M identical blocks of q F (q*,):B. Call the other N-M blocks of q F (q*,): {R}. • At a singularity (q*,*,*),B has a single nullvector v and Ris nonsingular for every . • If M<N, then BR-1 + MIKis nonsingular. • Theorem: If q, L(q*,*,*) is singular then q F (q*,*) is singular. • Theorem:(q*,*,*) is a bifurcation of equilibria of if and only if • q, L(q*,*, *) is singular. • Theorem: If (q*,*,*) is a bifurcation of equilibria of , then * 1. • Theorem: dim (ker q F (q*,* )) = M with basis vectors w1,w2, … , wM • Theorem: dim (ker q, L (q*,*,*)) = M-1 with basis vectors
Investigating the Dynamical System How: • Use numerical continuation in a constrained system to choose and to choose an initial guess to find the equilibria q*(). • Use bifurcation theory with symmetriesto understand bifurcations of the equilibria. Continuation • A local maximum qk*(k) of is an equilibrium of the gradient flow . • Initial condition qk+1(0)(k+1(0)) is sought in the tangent direction qk , which is found by solving the matrix system • The continuation algorithm used to find qk+1*(k+1) is based on Newton’s method.
q* (YN|Y) Conceptual Bifurcation Structure Bifurcations of q*() Observed Bifurcations for the 4 Blob Problem Bifurcations with symmetry To better understand the bifurcation structure, we capitalize on the symmetries of the optimization function F(q,). The “obvious” symmetry is that F(q,) is invariant to relabeling of the N classes of Z The symmetry group of all permutations on N symbols is SN. The action of SN on and q,L (q, ,)is represented by the finite Lie Group whereP is a “block permutation” matrix. The symmetry of is measured by its isotropy group, the subgroup of which fixes it.
What do the bifurcations look like? The Equivariant Branching Lemma gives the existence of bifurcating solutions for every isotropy subgroup which fixes a one dimensional subspace of kerq,L (q*,,). Theorem: Let (q*,*,*) be a singular point of the flow such that q*is fixed by SM. Then there exists M bifurcating solutions, (q*,*,*) + (tuk,0,(t)), each with isotropy group SM-1, where Bifurcation Structure Let T(q*,*) = Transcritical or Degenerate? Theorem: If T(q*,*)0 and M>2, then the bifurcation at (q*,*)is transcritical. If T(q*,*) = 0, it is degenerate. Branch Orientation? Theorem: If T(q*,*)> 0or if T(q*,*)< 0, then the branch is supercritical or subcritical respectively. If T(q*,*) = 0 , then 4qqqq F(q,) dictates orientation. Branch Stability? Theorem: If T(q*,*)0, then all branches fixed by SM-1 are unstable.
Partial lattice of the isotropy subgroups of S4 (and associated bifurcating directions) For the 4 blob problem:The isotropy subgroups and bifurcating directions of the observed bifurcating branches isotropy group:S4 S3 S2 1 bif direction:(-v,-v,3v,-v,0)T (-v,2v,0,-v,0)T (-v,0,0,v,0)T …No more bifs!
Other Branches The Smoller-Wasserman Theorem ascertains the existence of bifurcating branches for every maximal isotropy subgroup. Theorem: If M is a composite number, then there exists bifurcating solutions with isotropy group <p> for every element of order M in and every prime p|M. The bifurcating direction is in the p-1 dimensional subspace of kerq,L (q*,,) which isfixed by <p>. We have never numerically observed solutions fixed by <p> and so perhaps they are unstable. Lattice of the maximal isotropy subgroups <p> in S4 An example of redundancy: (1423)2= (1324)2=(12)(34) The full lattice of subgroups of the group SM is not known for arbitrary M.
The efficient algorithm to solve max F(q,) • Let q0 be the maximizer of maxqG(q), 0=1 and s > 0. For k 0, let (qk , k)be a solution to maxq (G(q) + D(q)). Iterate the following steps until K= B for some K. • Perform -step: solve • for and select k+1 =k + dk where • dk = s /(||qk||2 + ||k||2 +1)1/2. • The initial guess for qk+1 at k+1 is qk+1(0) = qk + dk qk . • Optimization:solve maxq (G(q) + k+1 D(q)) to get the maximizer q*k+1 , using initial guess qk+1(0) . • Check for bifurcation: compare the sign of the determinant of an identical block of each of q [G(qk) + k D(qk)] and q [G(qk+1) + k+1 D(qk+1)]. If a bifurcation is detected, then set qk+1(0) = qk + dku where u is given by and repeat step 3.