Download
1 / 15
180 likes | 721 Views
Sie bestehen aus 4 in der Regel ungleichlangen Gliedern, die durch 4 Gelenke miteinander verbunden sind: . 6. Umformelemente . 6.2 Kurbelgetriebe (Koppelgetriebe). Die Bewegungsübertragung erfolgt bei ebenen Koppelgetrieben mittels gelenkig verbundener Getriebeglieder.

E N D
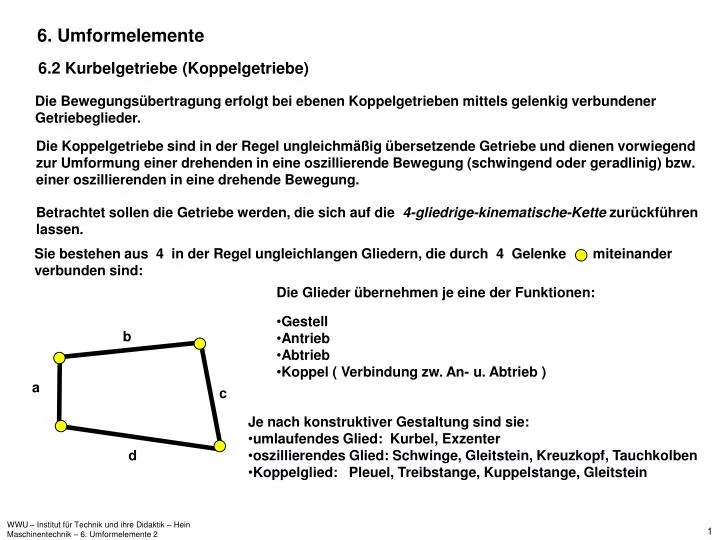
Sie bestehen aus 4 in der Regel ungleichlangen Gliedern, die durch 4 Gelenke miteinander verbunden sind: 6. Umformelemente 6.2 Kurbelgetriebe (Koppelgetriebe) Die Bewegungsübertragung erfolgt bei ebenen Koppelgetrieben mittels gelenkig verbundener Getriebeglieder. Die Koppelgetriebe sind in der Regel ungleichmäßig übersetzende Getriebe und dienen vorwiegend zur Umformung einer drehenden in eine oszillierende Bewegung (schwingend oder geradlinig) bzw. einer oszillierenden in eine drehende Bewegung. Betrachtet sollen die Getriebe werden, die sich auf die 4-gliedrige-kinematische-Kette zurückführen lassen. Die Glieder übernehmen je eine der Funktionen: • Gestell • Antrieb • Abtrieb • Koppel ( Verbindung zw. An- u. Abtrieb ) b a c • Je nach konstruktiver Gestaltung sind sie: • umlaufendes Glied: Kurbel, Exzenter • oszillierendes Glied: Schwinge, Gleitstein, Kreuzkopf, Tauchkolben • Koppelglied: Pleuel, Treibstange, Kuppelstange, Gleitstein d WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
Da die meisten Getriebe eine Kurbel als An- oder Abtriebsglied besitzen, wird die gesamte Getriebegruppe auch als Kurbelgetriebe bezeichnet. Die Gelenke sind als Dreh- oder Schubgelenke ausgeführt. Durch Variation der Zuordnung der einzelnen Funktionen zu den unterschiedlich langen Gliedern und der Form der Gelenke ergeben sich verschiedene Arten von Koppelgetrieben, die nach LICHTENHELD folgendermaßen geordnet werden können: 1. Gruppe : 4 Drehgelenke, 0 Schubgelenke Doppelkurbel Kurbelschwinge Doppelschwinge c c b b c d b d a a a d a: Gestell a: Kurbel a. Gestell b: Koppel b; d: Kurbeln b; d: Schwingen c: Schwinge c: Koppel c: Koppel d: Gestell Anwendungen: Scheibenwischergetriebe Nähmaschine (Fußantrieb) Strohpresse Fahrrad/Beine Kuppelstangengetriebe von Lokomotiven Schalterantriebe Wippkranausleger bei Hafenkränen WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
c: Gleitstein c: Gleitstein 2. Gruppe: 3 Drehgelenke, 1Schubgelenk Schubkurbel Kurbelschleife c c a b b d d a: Gestell a: Kurbel b: Kurbel b: Koppel (Schubstange) a d: Gestell d: Schleife Anwendungen: Waagerecht-Stoßmaschine Kolbenmotor, Kolbenpumpe, Dampfmaschine, Kompressor, Kurbelpresse Nähmaschine ( Nadelantrieb ) 3. Gruppe : 2 Drehgelenke, 2 Schubgelenke Hin- u. hergehende Kreuzschleife Anwendungen: kleine Kompressoren, Rasierapparate mit Motorantrieb, Filmaufnahmegeräte WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
b a c Massenkräfte: Schubkurbelgetriebe Zur Umwandlung von geradlinige Bewegungen in Drehbewegungen oder umgekehrt werden häufig Schubkurbelgetriebe eingesetzt. Sie haben neben dem Gestell drei bewegliche Glieder: Kurbel a, Koppel b, Gleitelement c. Die Verbindung zwischen den Gliedern erfolgt durch drei Drehgelenke und ein Schubgelenk. Es sind flächenhafte Gelenke, die in der Lage sind, auch große Kräfte zu übertragen. UT OT Die geradlinig bewegten Teile bewegen sich zwischen zwei Ruhepunkten (oberer und unterer Totpunkt) mit sich ständig ändernder Geschwindigkeit periodisch hin und her. Sie müssen dazu beschleunigt und wieder abgebremst werden. Es entstehen erhebliche Massen-kräfte, die zu einem unruhigen Lauf der Maschine führen können, wenn sie nicht ausgeglichen werden. Um die Größe der Massenkräfte bestimmen zu können, muss man den Wert der Beschleunigung in jedem Moment der Bewegung kennen. Die Beschleunigung kann grafisch oder auch rechnerisch ermittelt werden. Die Geschwindigkeit v des Gleitsteins hat etwa einen Sinusförmigen Verlauf. a v Seine Beschleunigung a entspricht etwa einer Cosinusfunktion (1. Ableitung: a = f´(v)). Die Abweichungen vom Sinus- und Cosinusverlauf von v und a ergeben sich aus der Länge der Koppel b. Je kürzer die Koppel, desto größer die Abweichungen. 2 WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
FT OT UT s FS FS FR FN FR r F F F FS FS r FN Die Tangentialkraftkomponente FT ergibt multipliziert mit dem Radius r das Drehmoment : In den „Totpunkten“ ist FT gleich Null, folglich auch das Drehmoment ! FR FS FS FT r FN Außer den Massekräften wirken auf die Getriebebauteile die Kräfte, die durch den Druck der Gase oder Flüssigkeiten auf den Kolben entstehen ( äußere Kräfte ). Auch diese Kräfte verändern in Abhängigkeit vom Kurbelwinkel ihren Wert. Außerdem werden sie in den Gelenkstellen in Komponenten zerlegt. Die äußeren und die Massenkräfte überlagern sich und ergeben die Gesamtbelastung der Getriebebauteile. FT Die Kolbenkraft F wird am Kolbenbolzen in die Stangenkraft FS und die Normalkraft FN zerlegt. Am Kurbelzapfen erfolgt eine erneute Zerlegung der Stangenkraft FS in die Tangential- oder Umfangskraft FT und die Radialkraft in der Kurbel FR . Die Veränderung der Kräfte wird für verschiedenen Kurbelwellenwinkel dargestellt. Schubkurbelgetriebe können also nur pulsierende Drehmomente erzeugen. Zur Vergleichmäßigung des Drehmomentes werden oft auf den Kurbel-Wellen zusätzliche Schwungräder montiert, die die Rotationsenergie zwischenzeitlich speichern und im Totpunktbereich wieder abgeben. Für bestimmte Berechnungen wird vereinfachend mit der mittleren Geschwindigkeit der geradlinig bewegten Bauteile gerechnet : WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
Maschinentisch Maschinentisch Maschinentisch Maschinentisch Rückstellfeder Zahnstangengetriebe Koppel Maschinenbett Kurvenscheibe 6.3 Kurvengetriebe Kurvengetriebe bestehen aus Kurvenglied, Koppel (Stößel) und Gestell. Kurvenglied und Koppel berühren sich einander im Kurvengelenk (Berührungspunkt). Kurvenscheibensteuerung Der Hub des Stößels ist den Radius der Kurvenscheibe proportional. Anwendung: Ventilsteuerung WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
6.4 Zugmittelgetriebe (Hüllgetriebe) Riemengetriebe Riemengetriebe dienen der Leistungsübertragung zwischen Wellen. Im Gegensatz zu Zahnradgetrieben sind sie für beliebige und besonders große Wellenabstände geeignet. Riemenarten: Flachriemen (glatte Scheiben) Keilriemen (Profilscheiben) Rundriemen (Profilscheiben) Zahnriemen (verzahnte Scheiben) Die Kraftübertragung wird außer bei Zahnriemen durch Reibung (kraftschlüssig) erzeugt. Durch Riemen- und auch Zahnradgetriebe sind mehrfache Leistungsverzweigungen möglich. Die Antriebswelle 1 überträgt über den Riemen 2 die Leistung auf die beiden Abtriebswellen 3 und 4. Mit der Spannrolle 5, die auch zur Leistungsübertragung genutzt werden kann, wird die erforderliche Vorspannkraft des Riemens eingestellt und im allgemeinen ein größerer Umschlingungswinkel erreicht. WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
Gegenüber Zahnrad- und Kettengetrieben lassen sich für Riemengetrieben folgende Vor- und Nachteile zusammenfassen: Vorteile: • Geringe Anschaffungs- und Wartungskosten, • elastische bzw. geschmeidige Kraftübertragung, • Schutz gegen Überlastung • Geräusch-, Stoß- und Schwingungsdämpfung • ruhiger Lauf • beliebige und große Wellenabstände möglich • einfache Bauteile • keine Schmierung erforderlich Nachteile: • Zur Erzeugung der Auflegedehnung sind meist Spannvorrichtungen • erforderlich, • 2. größerer Platzbedarf, • 3. auf Grund der Elastiztät des Riemens entstehen Schlupfverluste, wodurch eine • konstante Übersetzung nicht gewährleistet ist. Riemenführung Durch die variabel gestaltbare Riemenführung sind die Einsatzmöglichkeiten des Getriebes sehr vielfältig möglich. Schlupf entsteht durch Dehnung des Riemens beim Auflaufen auf die treibende Scheibe. Beim Mitlaufen zieht sich der Riemen wieder zusammen, so dass eine Geschwindigkeitsdifferenz zwischen Riemen und Scheibe entsteht. Offener Riementrieb WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2 : Umschlingungswinkel
Varianten von Riemengetrieben a: gekreuzter Riementrieb b: halb gekreuzter Riementrieb c: Winkeltrieb d, e: Mehrfachantrieb c a d Um die Kraftschlüssigkeit der der Drehmomentübertragung zu gewährleisten, müssen Riemen vorgespannt werden. e b WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
r1 r2 r1 r1 r2 r2 Verstell- bzw. Schaltgetriebe Die Änderung des Übersetzungsverhältnisses ist in Stufen und stufenlos möglich. Die Abbildungen zeigen einige Varianten. Riemenscheibe 1 Riemenscheibe 2 Jede Scheibe ist nur zur Hälfte gezeichnet, der Wellenabstand ist „entfernt“ worden. Keilscheiben- Verstellgetriebe Stufenscheibengetriebe Kegelscheibengetriebe In dem Maße, indem die Seiten der einen Scheibe gespreizt werden, führt ein Mechanismus die Seiten der anderen Scheibe zusammen. Dadurch verändern sie ihre Durchmesser. Der Riemen muss bei Stillstand umgelegt werden. Es gibt nur feste Übersetzungs-verhältnisse. Das Übersetzungsverhält-nis kann bei Betrieb verän-dert werden. Zwischen zwei Werten sind beliebige Über-setzungsverhältnisse möglich. WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
Flachriemen • Eigenschaften von Flachriemen: • möglichst geringe Biegesteifigkeit • hohe Zugfestigkeit • gutes Haftvermögen Werkstoffe: Leder, Gewebe (Textilien), Kombination (Leder/Polyamid), Vollsynthetik Aufbau: Kordriemen Bandriemen mit breiten Zugbändern Bandriemen D: Deckschicht; Z: Zugschicht; L: Laufschicht Keilriemen Keilriemen haben eine trapezförmige Querschnittsform. Sie bestehen aus einer Zugschicht (Kordfäden aus Polyesterfasern) und dem Kern (hochwertige Kautschuk-mischung) und der Umhüllung (gummiertes Baumwollgewebe). Die Abbildung zeigt die üblichen Bauformen. WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
Der Keilriemen zieht sich bei Belastung in die trapezförmige Rille der Scheibe. Durch die Keilwirkung der Flanken (Keilwinkel 32° - 38°) entsteht die erforderliche Reibung zur Übertragung des Drehmoments. Dabei darf der Keilriemen nicht auf dem Rillengrund der Scheibe aufliegen. Vorteile gegenüber dem Flachriemen: • geringere Vorspannung • geringere Lagerbelastung • kleinerer Umschlingungswinkel • bei gleicher Leistung des Getriebes. Die Kraftzerlegung am Keilriemen entspricht der Kraftzerlegung am Keil. Nachteile: • größere Walkarbeit • geringerer Wirkungsgrad Zahnriemen Der Zahnriemen ist ein formschlüssiges Antriebselement. Er besteht aus einem Zugelement aus Stahl oder Glasfaser, dem Riemenkörper aus Gummi sowie einem Polyamidgewebe zum Dauerhaften Schutz der Zähne. Neben den Ausführungen des Synchronriemens mit trapezförmigen Zahnprofilen wurde für die Übertragung großer Drehmomente bei kleinen Umfangsgeschwindigkeiten mit Halbrundprofil entwickelt. WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
Vorteile des Zahnriemens gegenüber dem Flach- und Keilriemen: • synchroner Lauf (i=const.) • hoher Wirkungsgrad ( < 0,99) • geringe Vorspannung • geringe Lagerbelastung • Mehrwellenantriebe möglich Weitere Zugmittelgetriebe: Kettengetriebe Nachteile: • teure Fertigung, besonders der Scheiben • hohe Empfindlichkeit gegenüber Fremdkörpern • stärkere Laufgeräusche • empfindlich gegen Überlastung, kein Gleiten möglich WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
Aufgaben 18 - 22 18. Ein Flachriemen wird mit 500 N auf eine Scheibe gedrückt. Die Drehzahl beträgt 750 min-1 , der Durchmesser 200 mm, die Reibungszahl wird mit 0,45 angenommen. Welche Leistung kann mit Hilfe des beschriebenen Riementriebs höchstens übertragen werden? (1,77 kW) • Ein Keilriemen wird durch Vorspannung und • Riemenzug mit einer Kraft von 500 N in die Nut der • Riemenscheibe gepresst. • Wie groß werden die Normalkräfte, die auf die • Seitenflächen der Nut wirken? (768 N) 20. Die Bohrspindel einer Tischbohrmaschine wird von einem Elektromotor mit einer Drehzahl von 710 min-1 und einer Leistung von 1kW über dreistufige Riemenscheiben angetrieben. Die Durchmesser der Stufenscheibe des Elektromotors betragen 100, 120 und 140 mm. Auf der Bohrspindel ist die gleiche Stufenscheibe mit der umgekehrten Reihenfolge der Durchmesser angebracht. Berechnen Sie die drei möglichen Übersetzungen! Welche Drehzahlen können eingestellt werden? Welche Leistung wirkt an der Bohrspindel, wenn der Wirkungsgrad des Antriebs 0,96 beträgt? Berechnen Sie die bei den drei Drehzahlen wirksamen Drehmomente. n1=507min-1; M1=18,1Nm n2=710min-1; M2=12,9 Nm n3=994min-1; M3=9,22 Nm Pab= 960 W WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2
21. Der Hub des Kolben eines Motorrads beträgt 58 mm. Welche Mittlere Kolbengeschwindigkeit ergibt sich bei einer Drehzahl von 5000 min-1? Hinweis: Will man die Kolbengeschwindigkeit eines Kurbelgetriebes errechnen, so ist man mit den Mitteln der elementaren Mathematik nur in der Lage, die mittlere Geschwindigkeit vm zu errechnen. Leiten Sie deshalb eine Gleichung für vm ab, wenn die Hublänge s und die Drehzahl bekannt sind. (vm=9,67 ms-1) 22. Ein Verbrennungsmotor erreicht bei einer Kolbengeschwindigkeit von 7,3 m/s-1 sein maximales Drehmoment von Mmax = 110 Nm. Der Hub des Kolbens beträgt 73 mm. Bei welcher Drehzahl erreicht der Motor sein maximales Drehmoment? Welche Leistung gibt der Motor beim maximalen Drehmoment ab? (n= 3000min-1; P=34,6 kW) WWU – Institut für Technik und ihre Didaktik – Hein Maschinentechnik – 6. Umformelemente 2