Download
1 / 1
10 likes | 120 Views
BIOMIMETIC CRAB ~ P11029 ~. BACKGROUND

E N D
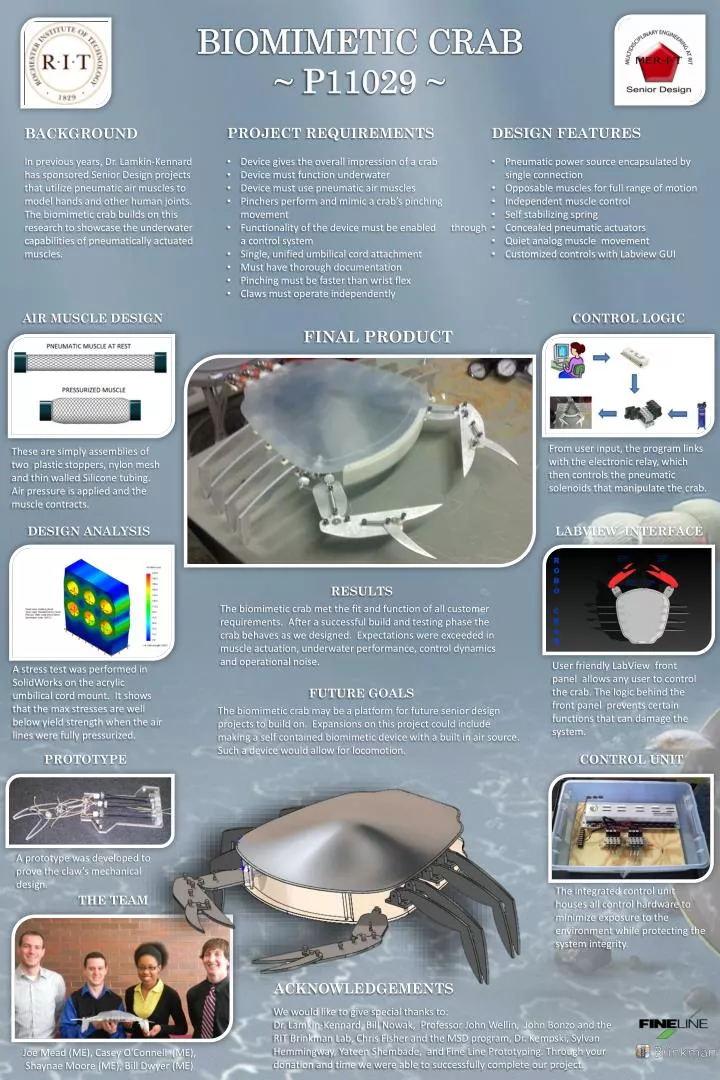
BIOMIMETIC CRAB ~ P11029 ~ BACKGROUND In previous years, Dr. Lamkin-Kennard has sponsored Senior Design projects that utilize pneumatic air muscles to model hands and other human joints. The biomimetic crab builds on this research to showcase the underwater capabilities of pneumatically actuated muscles. • PROJECT REQUIREMENTS • Device gives the overall impression of a crab • Device must function underwater • Device must use pneumatic air muscles • Pinchers perform and mimic a crab’s pinching movement • Functionality of the device must be enabled through a control system • Single, unified umbilical cord attachment • Must have thorough documentation • Pinching must be faster than wrist flex • Claws must operate independently • DESIGN FEATURES • Pneumatic power source encapsulated by single connection • Opposable muscles for full range of motion • Independent muscle control • Self stabilizing spring • Concealed pneumatic actuators • Quiet analog muscle movement • Customized controls with Labview GUI AIR MUSCLE DESIGN CONTROL LOGIC FINAL PRODUCT From user input, the program links with the electronic relay, which then controls the pneumatic solenoids that manipulate the crab. These are simply assemblies of two plastic stoppers, nylon mesh and thin walled Silicone tubing. Air pressure is applied and the muscle contracts. DESIGN ANALYSIS LABVIEW INTERFACE RESULTS The biomimetic crab met the fit and function of all customer requirements. After a successful build and testing phase the crab behaves as we designed. Expectations were exceeded in muscle actuation, underwater performance, control dynamics and operational noise. User friendly LabView front panel allows any user to control the crab. The logic behind the front panel prevents certain functions that can damage the system. A stress test was performed in SolidWorks on the acrylic umbilical cord mount. It shows that the max stresses are well below yield strength when the air lines were fully pressurized. FUTURE GOALS The biomimetic crab may be a platform for future senior design projects to build on. Expansions on this project could include making a self contained biomimetic device with a built in air source. Such a device would allow for locomotion. PROTOTYPE CONTROL UNIT A prototype was developed to prove the claw’s mechanical design. The integrated control unit houses all control hardware to minimize exposure to the environment while protecting the system integrity. THE TEAM ACKNOWLEDGEMENTS We would like to give special thanks to: Dr. Lamkin-Kennard, Bill Nowak, Professor John Wellin, John Bonzo and the RIT Brinkman Lab, Chris Fisher and the MSD program, Dr. Kempski, Sylvan Hemmingway, YateenShembade, and Fine Line Prototyping. Through your donation and time we were able to successfully complete our project. Joe Mead (ME), Casey O'Connell (ME), Shaynae Moore (ME), Bill Dwyer (ME)