Download
1 / 21
210 likes | 363 Views
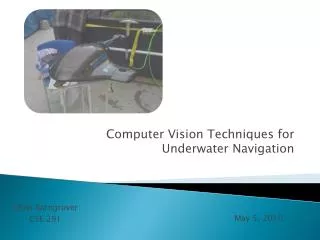
Dynamic Composition of Tracking Primitives for Interactive Vision-Guided Navigation. D. Burschka and G. Hager C omputational I nteraction and R obotics L aboratory (CIRL) Johns Hopkins University. Outline. Introduction Motivation – Navigation Strategies Tracking-System Architecture

E N D
Dynamic Composition of Tracking Primitives for Interactive Vision-Guided Navigation D. Burschka and G. Hager Computational Interaction and Robotics Laboratory (CIRL) Johns Hopkins University CIRL-JHU
Outline • Introduction • Motivation – Navigation Strategies • Tracking-System Architecture • Pre-Processing • New Tracking Definition • Feature Identification • Results • Conclusions CIRL-JHU
Navigation Strategies Map-Based Navigation pre-processed sensor data is stored in a geometrical representation of the envi- ronment (map). Path plan- ning+strategy algorithms are used to define the actions of the robot Sensor-Based Control control signals for the robot are generated directly from the visual input CIRL-JHU
Tracking Primitives Disparity tracking Pattern Tracking Color Tracking Dynamic Vision (XVision) algorithms CIRL-JHU
XVision as Tracking Tool Dynamic Vision (XVision) algorithms applications CIRL-JHU
Tracking-System Architecture CIRL-JHU
Dynamic Composition of Tracking Cues CIRL-JHU
Tracking-System Architecture CIRL-JHU
Segmentation in the ColorSpace Hue Saturation Intensity - HSI representation of color space - Variable resolution gridding of space CIRL-JHU
Segmentation in the Disparity Domain CIRL-JHU
Tracking-System Architecture CIRL-JHU
State Information saved in the Tracking Module • Information about the object in the real scene is shared between the different Image Identifications: • Position in the image • Size of the region • Range in the current image domain • Shape ratio in the image • Compactness of the region CIRL-JHU
Tracking-System Architecture CIRL-JHU
Quality Value for Initial Search CIRL-JHU
Problem in the Disparity Domain CIRL-JHU
Ground Plane Suppression CIRL-JHU
Results Obstacle Detection CIRL-JHU
Results Dynamic Composition CIRL-JHU
Conclusions and Future Work: • Dynamic Composition of the two Basic Feature Identification tools allowed robust initial selection and navigation through a door • Extension to the entire set of Feature Identification tools is our next step • The developed algorithms allow robust obstacle avoidance CIRL-JHU
Additional Information: Web: http://www.cs.jhu.edu/CIRL http://www.cs.jhu.edu/~burschka CIRL-JHU