Download
1 / 9
160 likes | 456 Views
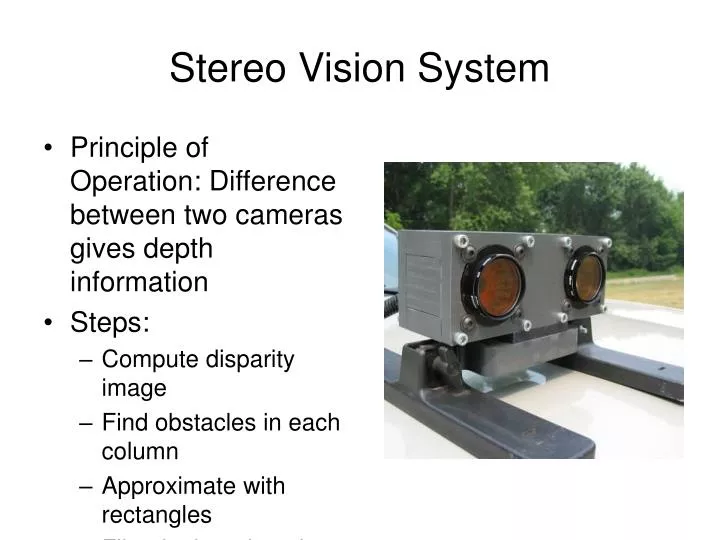
Stereo Vision System. Principle of Operation: Difference between two cameras gives depth information Steps: Compute disparity image Find obstacles in each column Approximate with rectangles Filter in time domain. Challenges. Quantization Noise Lighting condition Field of view Occlusion

E N D
Stereo Vision System • Principle of Operation: Difference between two cameras gives depth information • Steps: • Compute disparity image • Find obstacles in each column • Approximate with rectangles • Filter in time domain
Challenges • Quantization • Noise • Lighting condition • Field of view • Occlusion • Range
The left camera sees: Point Grey Bumblebee Focal Length: 4mm Resolution: 640x480 Black & White
The right camera sees: Point Grey Bumblebee Focal Length: 4mm Resolution: 640x480 Black & White
Yielding a disparity map: Intensity indicates distance: the lighter, the closer White indicates an invalidated location.
Processing in each column: Intensity indicates confidence that an obstacle exists at that location. A darker line indicates a higher confidence.
Bounding with rectangles: Darker rectangles indicate higher confidence.
Data Representation vs. Reference: http://www.darpa.mil/grandchallenge/TechPapers/Stanford.pdf