Download
1 / 1
10 likes | 175 Views
Switching Control of MRs for Autonomous Navigation in Unknown Environments. Juan Marcos Toibero, Ricardo Carelli , and Benjamin Kuchen Instituto de Automática (INAUT) , San Juan National University, ARG. Switching controller for positioning a unicycle-like WMR at a desired final posture

E N D
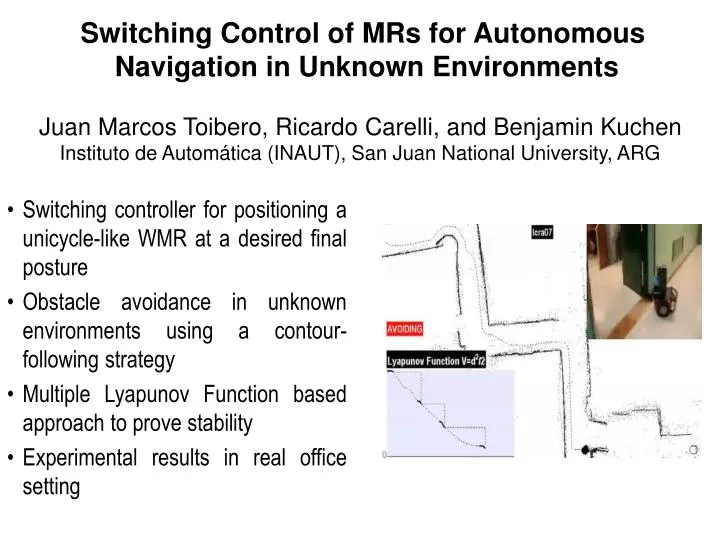
Switching Control of MRs for Autonomous Navigation in Unknown Environments Juan Marcos Toibero, Ricardo Carelli, and Benjamin KuchenInstituto de Automática (INAUT), San Juan National University, ARG • Switching controller for positioning a unicycle-like WMR at a desired final posture • Obstacle avoidance in unknown environments using a contour- following strategy • Multiple Lyapunov Function based approach to prove stability • Experimental results in real office setting