Download
1 / 1
20 likes | 173 Views
h. h + l p. Altimeter Calibration with a Dedicated Transponder. E. Cristea, W. Hausleitner, P. Pesec, IWF/ÖAW, Austria. General Techniques of Satellite Geodesy.

E N D
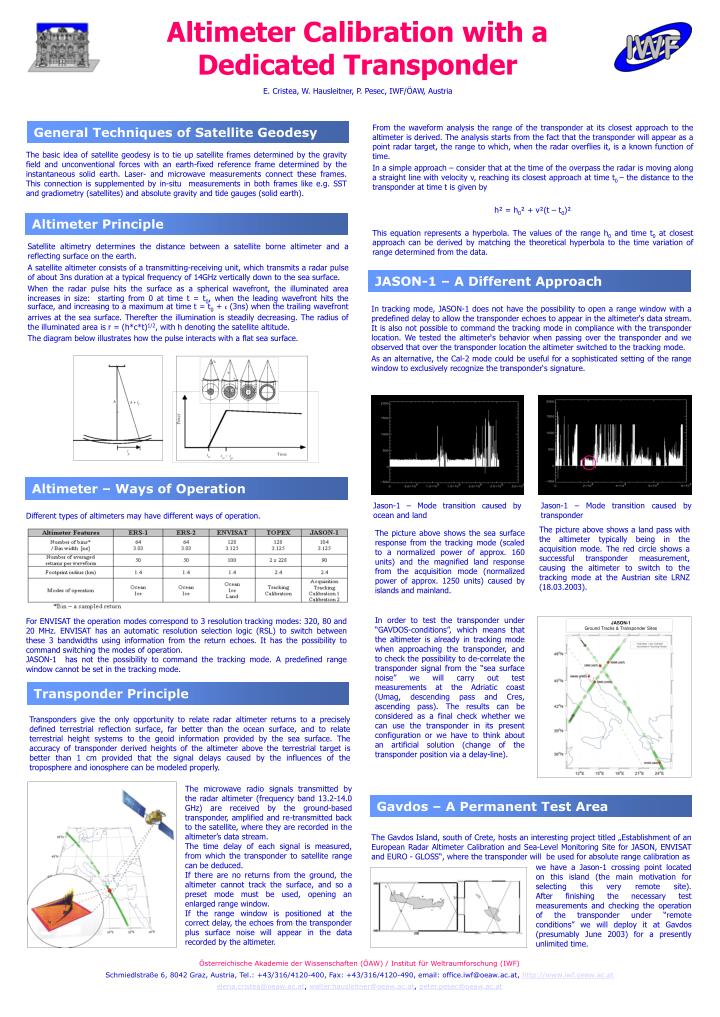
h h + lp Altimeter Calibration with a Dedicated Transponder E. Cristea, W. Hausleitner, P. Pesec, IWF/ÖAW, Austria General Techniques of Satellite Geodesy From the waveformanalysis the range of the transponder at its closest approach to the altimeter is derived. The analysis starts from the fact that the transponder will appear as a point radar target, the range to which, when the radar overflies it, is a known function of time. In a simple approach – consider that at the time of the overpass the radar is moving along a straight line with velocity v, reaching its closest approach at time t0 – the distance to the transponder at time t is given by h² = h0² + v²(t – t0)² This equation represents a hyperbola. The values of the range h0 and time t0 at closest approach can be derived by matching the theoretical hyperbola to the time variation of range determined from the data. The basic idea of satellite geodesy is to tie up satellite frames determined by the gravity field and unconventional forces with an earth-fixed reference frame determined by the instantaneous solid earth. Laser- and microwave measurements connect these frames. This connection is supplemented by in-situ measurements in both frames like e.g. SST and gradiometry (satellites) and absolute gravity and tide gauges (solid earth). Altimeter Principle Satellite altimetry determines the distance between a satellite borne altimeter and a reflecting surface on the earth. A satellite altimeter consists of a transmitting-receiving unit, which transmits a radar pulse of about 3ns duration at a typical frequency of 14GHzvertically down to the sea surface. When the radar pulse hits the surface as a spherical wavefront, the illuminated area increases in size: starting from 0 at time t=t0, when the leading wavefront hits the surface, and increasing to a maximum at time t=t0 + t(3ns) when the trailing wavefront arrives at the sea surface. Therefter the illumination is steadily decreasing. The radius of the illuminated area is r = (h*c*t)1/2, with h denoting the satellite altitude. The diagram below illustrates how the pulse interacts with a flat sea surface. JASON-1 – A Different Approach In tracking mode, JASON-1 does not have the possibility to open a range windowwith a predefined delay to allow the transponder echoes to appear in the altimeter‘s data stream. It is also not possible to command the tracking mode in compliance withthe transponder location.We tested the altimeter‘s behavior when passing over the transponder and we observed that over the transponder location the altimeter switched to the tracking mode. As an alternative, the Cal-2 mode could be useful for a sophisticated setting of the range window to exclusively recognize the transponder‘s signature. Altimeter – Ways of Operation Jason-1 – Mode transition caused by ocean and land Jason-1 –Mode transition caused by transponder Different types of altimeters may have different ways of operation. For ENVISAT the operation modes correspond to 3 resolution tracking modes: 320, 80 and 20 MHz. ENVISAT has an automatic resolution selection logic (RSL) to switch between these 3 bandwidths using information from the return echoes. It has the possibility to command switching the modes of operation. JASON-1 has not the possibility to command the tracking mode. A predefined range window cannot be setin the tracking mode. The picture above shows a land pass with the altimeter typically being in the acquisition mode. The red circle shows a successful transponder measurement, causing the altimeter to switch to the tracking mode at the Austrian site LRNZ (18.03.2003). The picture above shows thesea surface response from the tracking mode (scaled to a normalized power of approx. 160 units) and the magnified land response from the acquisition mode (normalized power of approx. 1250 units) caused by islands and mainland. In order to test the transponder under “GAVDOS-conditions”, which means that the altimeter is already in tracking mode when approaching the transponder, and to check the possibility to de-correlate the transponder signal from the “sea surface noise” we will carry out test measurements at the Adriatic coast (Umag, descending pass and Cres, ascending pass). The results can be considered as a final check whether we can use the transponder in its present configuration or we have to think about an artificial solution (change of the transponder position via a delay-line). JASON-1Ground Tracks & Transponder Sites Transponder Principle Transponders give the only opportunity to relate radar altimeter returns to a precisely defined terrestrial reflection surface, far better than the ocean surface, and to relate terrestrial height systems to the geoid information provided by the sea surface. The accuracy of transponder derived heights of the altimeter above the terrestrial target is better than 1 cm provided that the signal delays caused by the influences of the troposphere and ionosphere can be modeled properly. The microwave radio signals transmitted by the radar altimeter (frequency band 13.2-14.0 GHz) are received by the ground-based transponder, amplified and re-transmitted back to the satellite, where they are recorded in the altimeter’s data stream. The time delay of each signal is measured, from which the transponder to satellite range can be deduced. If there are no returns from the ground, the altimeter cannot track the surface, and so a preset mode must be used, opening an enlarged range window. If the range window is positioned at the correct delay, the echoes from the transponder plus surface noise will appear in the data recorded by the altimeter. Gavdos – A Permanent Test Area The Gavdos Island, south of Crete, hosts an interesting project titled „Establishment of an European Radar Altimeter Calibration and Sea-Level Monitoring Site for JASON, ENVISAT and EURO-GLOSS“,where the transponder will be used for absolute range calibration as we have a Jason-1 crossing point located on this island (the main motivation for selecting this very remote site). After finishing the necessary test measurements and checking the operation of the transponder under “remote conditions” we will deploy it at Gavdos (presumably June 2003) for a presently unlimited time.