Download
1 / 22
220 likes | 339 Views
Locally adaptive template sizes for matching repeat images of Earth surface mass movements. Misganu Debella-Gilo a and Andreas Kääb b a, b Institute of Geosciences, University of Oslo, P. O. Box 1047, Oslo, Norway a m.d.gilo@geo.uio.no. Contents. Introduction Methods Results

E N D
Locally adaptive template sizes for matching repeat images of Earth surface mass movements Misganu Debella-Giloa and Andreas Kääbb a, bInstitute of Geosciences, University of Oslo, P. O. Box 1047, Oslo, Norway a m.d.gilo@geo.uio.no
Contents • Introduction • Methods • Results • Conclusion
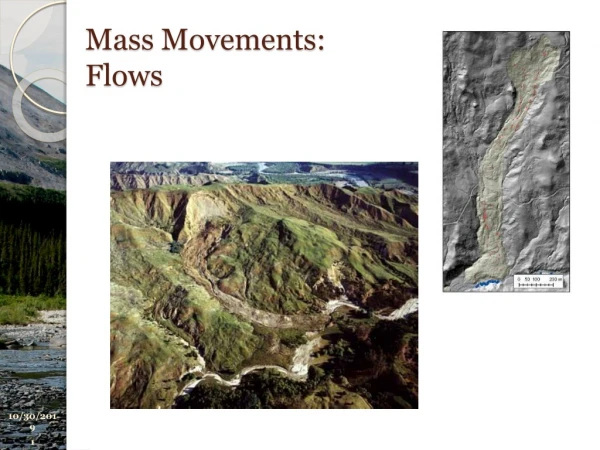
Introduction • Repeat optical images are often used to monitor the displacement of Earth surface masses (e.g. glacier flow, permafrost creep, rock slide, etc) • Independently ortho-rectified and co-registered images are matched using certain similarity (dissimilarity) measure • Most commonly the normalized cross-correlation (NCC) is used • Image subset (template) from reference image (usually older) is taken and its conjugate is searched in the target image (usually newer) • The distance between the central pixels of the reference and the search templates is comupted as the horizontal displacement
Compute cross-correlation coefficient Locate the peak Compute displacement
The issue …what template size is appropriate? • Small templates lack adequate signal variance for the matching …. Ambiguity (noise) problem • Large templates may contain within template displacement gradient… geometric distortion • There is a need to compromise between ambiguity and geometric distortion • Noise and distortion levels may vary spatially • Need for spatially adaptive template sizes • Ideal template: • Contains optimum SNR, • Contains no geometric distortion, and • Is able to identify distinct feature when encountered • Its true match exists with optimized correlation coefficient • The study presents an algorithm which tries to meet these characteristics
Template size vs. SNR • SNR=σ2s/σ2n • Noise variance is computed using Immerkær’s (1996) method where the difference between two Laplacian masks is used to convolve the image • To explore the relationship between SNR and template size: • Syntethic image containing distinct feature of 61 by 61 pixels which repeat itself was created • The SNR was then computed for varying template sizes starting from 3 by 3 pixels up to a maximum size set depending on the spatial resolution of the image and mass movement type • The computation was then conducted on real images • Image sections of good contrast and poor contrast are included
For small templates the noise variance is very high while the signal variance is low therefore the SNR is very low….. Poor information content • As the size increases, the SNR increases. • If edge is encountered the SNR rises sharply, and then decreases after crossing the edge • The first encountered peak shows some kind of feature boundary • It can also be saturation of signal SNR Template (window) size
Thus SNR peak can be used to identify matchable templates • But the matable template may be occluded or changed unrecognizably • But the NCC needs to be computed to know if the size is optimum and if the template has a match
Template size and NCC • To know the effect of template size on NCC peak, NCC peak is computed for varying template sizes • For small templates, the maximum NCC is very high but ambiguous due to inadequate signal variance
The presence or absence of the peak of the SNR can help in selecting matchable templates and excluding unmatchable ones • The presence or absence of the peak of the NCC maxima can help in determining optimum template sizes (which have true matches with optimized correlation-coefficient) and in excluding occluded templates • The algorithm tries to satisfy these conditions at each location
Method • Procedures: • Take central pixels at intervals • Compute SNR until it attains the first peak • If it attains a peak within the set maximum value, take the template and its size (Tw), • If no peak is attained, reject that central pixel • For the central pixels that passed the SNR test, compute the NCC using the template sizes ranging beteen half Tw and twice Tw • If the NCC attained a peak and the matching position is fixed over 3 consecutive template sizes, take that size as optimum and record the matching positions and compute the displacements • The algorithm is applied and evaluated on: • artificially deformed image: a glacier image subset was deformed artificially with full pixel displacement and Gaussian noise was added to model bi-temporal images • Landsat PAN image pair of Baltoro glacier (Himalaya) with one year apart, • Radarsat2 intensity image pair of Cronebreen glacier (Svalbard) with 25 days apart
Evaluation • Visual: ….looking at the pattern of the computed displacement vectors • Mean Absolute Difference (MAD) between the computed and actual displacement for the artificially deformed images • SNR gain of reconstructing the reference image from the deformed image • Compute the global correlation coefficient (ρg) between the reference and the reconstructed • SNR =(ρg)/(1- ρg) • SNRgain=SNR (reconstructed)-SNR(origional) • Both the MAD and SNR gain are compared to that of different globally (image-wide) fixed template sizes
A B C D Results Displacement vectors computed using globally fixed template sizes of 11 pixels (A), 61 pixels (B) and the locally adaptive algorithm (C) together with the histogram of the template sizes of the locally adaptive algorithm (D) for the noisy test image. • Artificially deformed images
Global correlation coefficients between the original reference image and the search image before (dashed horizontal lines), after reconstructing using the globally fixed (dotted lines) and the locally adapted (smooth horizontal lines) template sizes for the noise-free (left) and the noisy (right) test images Mean absolute error of displacement (MAEd) of the globally fixed template sizes (dotted line) and the locally adaptive algorithm (horizontal line) for the noise-free (left) and noisy (right) test images
Statistics Table 1. Displacement statistics for the small, large and locally adapted template sizes for the central pixel of their respective templates of the noisy test image. aThe numbers in the brackets are the corresponding MAEd. Notice that by using the locally adaptive algorithm, the MAEd of the large template size is reduced by about 63% while that of the small template size is reduced by about 91%.
Conclusions • A new algorithm for locally adaptive template sizes in Normalized Cross-Correlation (NCC)-based image matching for displacement measurement of Earth surface mass movements is tested and evaluated. • The algorithm performs better than globally fixed template sizes in its accuracy of matching and displacement estimation • It removes the mismatches due to ambiguity (noise) in small template sizes and reduces the errors of misrepresentation due to displacement gradient in large template sizes • Errors due to geometric distortion remain only where high noise level or lack of good signal variance necessitate the use of large template sizes. • The algorithm discards most of the templates which lack sufficient SNR and occluded templates (i.e. templates whose matches do not exist). • Pushes one step towards automation • The computational efficiency of the algorithm is low and needs to be improved.
Acknowledgements • This study was supported by The Research Council of Norway (NFR) through the CORRIA project (no. 185906/V30), Thank you!