Download
1 / 27
270 likes | 454 Views
2D BEAM STEERING USING ELECTROSTATIC AND THERMAL ACTUATION FOR NETWORKED CONTROL. Jitendra Makwana 1 , Stephen Phillips 1 , Lifeng Wang 1 , Nathan Wedge 2 , and Vincenzo Liberatore 2 1 Department of Electrical Engineering Arizona State University Tempe, Arizona

E N D
2D BEAM STEERING USING ELECTROSTATIC AND THERMAL ACTUATION FOR NETWORKED CONTROL Jitendra Makwana1, Stephen Phillips1, Lifeng Wang1, Nathan Wedge2, and Vincenzo Liberatore2 1Department of Electrical Engineering Arizona State University Tempe, Arizona 2Department of Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio
OUTLINE • Networked Control Systems • NCS and MEMS • Example Testbed • Beam Steering Actuator • Modelling and Proposed Fabrication • Simulated Performance • Conclusion and Future Work
Feedback Control S • Traditional feedback • Multiple sensors/actuators • Dedicated channels with deterministic delays • Predictable performance without failures • Robust to physical system variations Physical System A Controller
Networked Control System (NCS) • NCS feedback • Reconfigurable structure • Communication with nondeterministic delays • Robust to communication failures
NCS and MEMS • In MEMS • NCS enables operation distant from its control • Complex control strategies achieved by leveraging remote computational power • Extends the capability of an integrated MEMS device • Beam steering device as actuator for NCS testbed • One example testbed involves a mobile agents performing laser tracking
Battlefield Application • Steered Beam • Secure communications • Resource tracking • Target tracking • Robust to obstacles, node failures, communication failures
Actuator and Sensor • Implementation • 2DoF Tilting mirror actuator • Measured beam position sensor
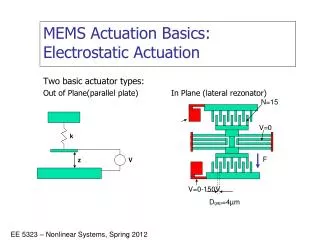
REQUIREMENTS • For a beam steering actuator • 2 Degrees of freedom • Low power consumption/dissipation • Low voltage for electrostatic actuation • Low current for thermal actuation • Fast steering capabilities • Adequate tilt angle
SPRING CANTILEVER BEAM MIRROR ELECTROSTATIC ACTUATION • Zipper actuator top view • Large deflections at low voltages • Four cantilever beams • Two springs per beam • Mirror
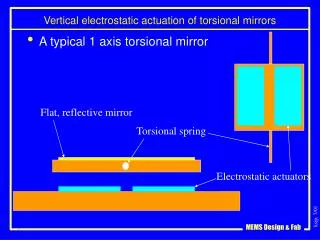
ARC MIRROR SPRING AMORPHOUS SILICON ALUMINUM LENGTH, L2 LENGTH, L1 GAP, g NITRIDE LENGTH, L ELECTROSTATIC ACTUATION • Zipper actuator side view • Sputtered aluminum for structure, conductivity, reflectivity • Anti-reflective coating (ARC) allows for only mirror reflectivity • Sacrificial Oxide for air-gap between the top and bottom plates • Silicon nitride (SiN) prevents top and bottom plate shorting
ARC MIRROR SPRING AMORPHOUS SILICON ALUMINUM LENGTH, L2 LENGTH, L1 GAP, g NITRIDE LENGTH, L ELECTROSTATIC ACTUATION • Zipper actuator side view • Mirror held by beams through springs • Beams at ground potential • Bottom plates positive actuation voltage
D D D D ELECTROSTATIC ACTUATION • Zipper actuator after release: Simulated • Al vs. a-Si coefficients of thermal expansion • Beams bend upwards • Mirror elevation is 25 mm Max. stress at supports D is 43 MPa Max. stress in springs is 60 MPa
ELECTROSTATIC ACTUATION • Zipper actuator design and model • Fe: Electrostatic force • V : Voltage applied • W : Width of cantilever beam = 100 mm • H : Top electrode thickness = 0.5 mm • g : Air gap = 1 mm • xdef = Cantilever beam deflection
ELECTROSTATIC ACTUATION • Zipper actuator design and model - Electric field θ = xdef = 8.75 mm for 5o tilt L2 = Mirror length = 100 mm
ELECTROSTATIC ACTUATION • Zipper actuator design and model Fe = Fb Fb: Cantilever beam force = kcxdef L = Mirror length = 505 mm kc: Composite cantilever beam spring constant = 146 x 10-9 N/mm Eeq: 94 GPa (from simulation)
ELECTROSTATIC ACTUATION • vs. V: Simulated θ
ELECTROSTATIC ACTUATION • Gap much less than beam width • Squeeze-film damping effects are dominant. The quality factor and the damping coefficient are:
ELECTROSTATIC ACTUATION • Zipper actuator switching capability - Rise time (tr) and Settling time (ts) for a second order systemis given by D D ωn≈ ωd =2.5×104 rad/s (simulation)
D D D D ELECTROSTATIC ACTUATION • Zipper actuator tilt: Simulated Room temperature Max. stress at supports D is 130 MPa Max. stress at springs is 500 MPa Rise time 63 ms Settling time 702 ms D
MIRROR SPRING ALUMINUM SILICON NITRIDE LENGTH, L2 GAP, g LENGTH, L THERMAL ACTUATION • Thermal actuator side view • Al and SiN multilayer cantilever beams • Joule heating in serpentine top layer • Nitride layer used for thermal insulation
MIRROR SPRING ALUMINUM SILICON NITRIDE LENGTH, L2 GAP, g LENGTH, L THERMAL ACTUATION • Thermal actuator side view • Top Al is much thinner than bottom Al layer • Release at room temperature, all beams bend upwards • Similar to electrostatic zipper actuator
THERMAL ACTUATION • Thermal actuator thermal energy • Heat energy (J) required to heat rm = Density of aluminum = 2700 kg/m3 a = Aluminum thickness of serpentine = 0.1 mm W = Aluminum width of serpentine = 15 mm L = Aluminum length of serpentine= 3.64 x 103mm Cm = Specific heat per unit mass for aluminum = 900 J/(kg-K)
THERMAL ACTUATION • Thermal actuator heating/power dissipation
THERMAL ACTUATION DT = T - 298 K D D D D Max. stress at supports D is 300 MPa Max. stress at springs is 230 MPa
THERMAL ACTUATION • Time (t) required to heat resistor at 1 mA of current using voltage variable source
SUMMARY • Beam steering using electrostatic, thermal actuation. • Four cantilever beams with spring suspended mirror • Electrostatic tilt angle of 5oat 43 V. • Electrostatic actuator tr and ts are 63 ms and 702 ms • Thermal actuator DT = 60 K for 5o tilt in 10 ms. • Fabrication in progress • NSF funding through grant CCR-0329910