Download
1 / 50
500 likes | 629 Views
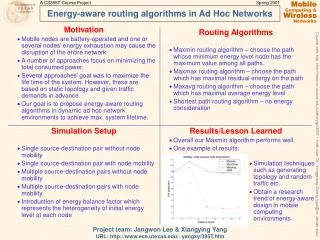
alg. hoc. net. 2005. Algorithms for Ad Hoc Networks. Roger Wattenhofer MedHocNet 2005. Small community O(…), (…), (…) Everybody knows best paper New algorithm: Compare it with the best previous

E N D
alg hoc net 2005 Algorithms for Ad Hoc Networks Roger Wattenhofer MedHocNet 2005
Small community O(…), (…), (…) Everybody knows best paper New algorithm: Compare it with the best previous Sometimes study the wrong problem; propose protocols that are waytoo complicated Big community Milliseconds Everybody knows first* paper New protocol: Compare it with the first that was proposed Reinvent the wheel; many papers do not offer any progress Distributed Algorithms vs. Ad Hoc Networking Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Link Layer Network Layer Services Theory/Models Clustering (Dominating Sets, etc.) MAC Layer and Coloring Topology and Power Control Interference and Signal-to-Noise-Ratio Deployment (Unstructured Radio Networks) New Routing Paradigms (e.g. Link Reversal) Geo-Routing Broadcast and Multicast Data Gathering Location Services and Positioning Time Synchronization Modeling and Mobility Lower Bounds for Message Passing Selfish Agents, Economic Aspects, Security Algorithmic Research in Ad Hoc and Sensor Networking Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Overview • Introduction • Ad Hoc and Sensor Networks • Routing / Broadcasting • Clustering • Conclusions Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Routing in Ad Hoc Networks • Multi-Hop Routing • Moving information through a network from a source to a destination if source and destination are not within mutual transmission range • Reliability • Nodes in an ad-hoc network are not 100% reliable • Algorithms need to find alternate routes when nodes are failing • Mobile Ad-Hoc Network (MANET) • It is often assumed that the nodes are mobile Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Proactive Routing Small topology changes trigger a lot of updates, even when there is no communication does not scale Reactive Routing Flooding the whole network does not scale Simple Classification of Ad hoc Routing Algorithms Flooding: when node received message the first time, forward it to all neighbors Distance Vector Routing: as in a fixnet nodes maintain routing tables using update messages no mobility critical mobility mobility very high Source Routing (DSR, AODV): flooding, but re-use old routes Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Discussion • Lecture “Mobile Computing”: 10 Tricks 210 routing algorithms • In reality there are almost that many! • Q: How good are these routing algorithms?!? Any hard results? • A: Almost none! Method-of-choice is simulation… • Perkins: “if you simulate three times, you get three different results” • Flooding is key component of (many) proposed algorithms • At least flooding should be efficient Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Overview • Introduction • Clustering • Flooding vs. Dominating Sets • Algorithm Overview • Phase A • Phase B • Lower Bounds • Conclusions Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Finding a Destination by Flooding Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Finding a Destination Efficiently Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
(Connected) Dominating Set • A Dominating Set DS is a subset of nodes such that each node is either in DS or has a neighbor in DS. • A Connected Dominating Set CDS is a connected DS, that is, there is a path between any two nodes in CDS that does not use nodes that are not in CDS. • It might be favorable tohave few nodes in the (C)DS. This is known as theMinimum (C)DS problem. Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Formal Problem Definition: M(C)DS • Input: We are given an (arbitrary) undirected graph. • Output: Find a Minimum (Connected) Dominating Set,that is, a (C)DS with a minimum number of nodes. • Problems • M(C)DS is NP-hard • Find a (C)DS that is “close” to minimum (approximation) • The solution must be local (global solutions are impractical for mobile ad-hoc network) – topology of graph “far away” should not influence decision who belongs to (C)DS Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Overview • Introduction • Clustering • Flooding vs. Dominating Sets • Algorithm Overview • Phase A • Phase B • Lower Bounds • Topology Control • Conclusions Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Algorithm Overview Input: Local Graph Fractional Dominating Set Dominating Set Connected Dominating Set 0.2 0.2 0 0.5 0.3 0 0.8 0.3 0.5 0.1 0.2 Phase B: Probabilistic algorithm Phase C: Connect DS by “tree” of “bridges” Phase A: Distributed linear program rel. high degree gives high value Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Overview • Introduction • Clustering • Flooding vs. Dominating Sets • Algorithm Overview • Phase A • Phase B • Lower Bounds • Topology Control • Conclusions Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Phase A is a Distributed Linear Program • Nodes 1, …, n: Each node u has variable xuwith xu¸ 0 • Sum of x-values in each neighborhood at least 1 (local) • Minimize sum of all x-values (global) 0.5+0.3+0.3+0.2+0.2+0 = 1.5 ¸ 1 • Linear Programs can be solved optimally in polynomial time • But not in a distributed fashion! That’s what we do here… Linear Program 0.2 0.2 0 0.5 0.3 0 0.8 0.3 0.5 0.1 0.2 Adjacency matrix with 1’s in diagonal Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Phase A Algorithm Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Result after Phase A • Distributed Approximation for Linear Program • Instead of the optimal values xi* at nodes, nodes have xi(), with • The value of depends on the number of rounds k (the locality) Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Overview • Introduction • Clustering • Flooding vs. Dominating Sets • Algorithm Overview • Phase A • Phase B • Lower Bounds • Topology Control • Conclusions Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Dominating Set as Integer Program • What we have after phase A • What we want after phase B Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Phase B Algorithm Each node applies the following algorithm: • Calculate (= maximum degree of neighbors in distance 2) • Become a dominator (i.e. go to the dominating set) with probability • Send status (dominator or not) to all neighbors • If no neighbor is a dominator, become a dominator yourself Highest degree in distance 2 From phase A Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Result after Phase B • Randomized rounding technique • Expected number of nodes joining the dominating set in step 2 is bounded by log(+1) ¢ |DSOPT|. • Expected number of nodes joining the dominating set in step 4 is bounded by |DSOPT|. Theorem: E[|DS|] · O( ln ¢ |DSOPT|) Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Related Work on (Connected) Dominating Sets • Global algorithms • Johnson (1974), Lovasz (1975), Slavik (1996): Greedy is optimal • Guha, Kuller (1996): An optimal algorithm for CDS • Feige (1998): ln lower bound unless NP 2 nO(log log n) • Local (distributed) algorithms • “Handbook of Wireless Networks and Mobile Computing”: All algorithms presented have no guarantees • Gao, Guibas, Hershberger, Zhang, Zhu (2001): “Discrete Mobile Centers” O(loglog n) time, but nodes know coordinates • MIS-based algorithms (e.g. Alzoubi, Wan, Frieder, 2002) that only work on unit disk graphs. • Kuhn, Wattenhofer (2003): Tradeoff time vs. approximation Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Recent Improvements • Improved algorithms (in submission): • O(log2 / 4) time for a (1+)-approximation of phase A with logarithmic sized messages. • If messages can be of unbounded size there is a constant approximation of phase A in O(log n) time, using the graph decomposition by Linial and Saks. • An improved and generalized distributed randomized rounding technique for phase B. • Works for quite general linear programs. • Is it any good…? Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Overview • Introduction • Clustering • Flooding vs. Dominating Sets • Algorithm Overview • Phase A • Phase B • Lower Bounds • Topology Control • Conclusions Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Lower Bound for Dominating Sets: Intuition… • Two graphs (m << n). Optimal dominating sets are marked red. complete n n n … n-1 m m m n |DSOPT| = 2. |DSOPT| = m+1. Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Lower Bound for Dominating Sets: Intuition… • In local algorithms, nodes must decide only using local knowledge. • In the example green nodes see exactly the same neighborhood. • So these green nodes must decide the same way! … n-1 m m n Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Lower Bound for Dominating Sets: Intuition… • But however they decide, one way will be devastating (with n = m2)! complete n n n … n-1 m m m n |DSOPT| = 2. |DSOPT without green| ¸ m. |DSOPT| = m+1. |DSOPT with green| > n Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
The Lower Bound • Lower bounds (Kuhn, Moscibroda, Wattenhofer @ PODC 2004): • Model: In a network/graph G (nodes = processors), each node can exchange a message with all its neighbors for k rounds. After k rounds, node needs to decide. • We construct the graph such that there are nodes that see the same neighborhood up to distance k. We show that node ID’s do not help, and using Yao’s principle also randomization does not. • Results: Many problems (vertex cover, dominating set, matching, etc.) can only be approximated (nc/k2/ k) and/or (1/k / k). • It follows that a polylogarithmic dominating set approximation (or maximal independent set, etc.) needs at least (log / loglog ) and/or ((log n / loglog n)1/2) time. Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Graph Used in Dominating Set Lower Bound • The example is for k = 3. • All edges are in fact special bipartite graphswith large enough girth. Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
A Theory of “Locality”? • Ad hoc and sensor networks • The largest network in the world?!? • Managing organizations? Society?!? • Matrix multiplication, etc. Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
v 1 u A better and faster algorithm • Assume that nodes know their position (GPS) • Assume that nodes are in the plane; two nodes are within their transmission radius if and only if their Euclidean distance is at most 1 (UDG, unit disk graph) Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Then… half of tx radius Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Algorithm • Beacon your position • If, in your virtual grid cell, you are the node closest to the center of the cell, then join the CDS, else do not join. • That’s it. • 1 transmission per node, O(1) approximation, even for CDS • If you have mobility, then simply “loop” through algorithm, as fast as your application/mobility wants you to. Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
First algorithm (distributed linear program) Algorithm computes CDS k2+O(1) transmissions/node O(O(1)/klog ) approximation General graph No position information Second algorithm (virtual grid) Algorithm computes CDS 1transmission/node O(1) approximation Unit disk graph (UDG) Position information (GPS) Comparison Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
General Graph Captures obstacles Captures directional radios Often too pessimistic UDG & GPS UDG is not realistic GPS not always available Indoors 2D 3D? Often too optimistic Let’s talk about models… too pessimistic too optimistic Are there any models in between these extremes? Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Models UDG No GPS UDG GPS General Graph too pessimistic too optimistic Unit Ball Graph Quasi UDG Bounded Growth In a doubling metric: Number of independent neighbors is bounded (UDG: 5) 1 d Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Another Algorithm 1: MIS • Build maximal independent set (MIS), then connect MIS for CDS • Proposed by many, patented(!) by Alzoubi et al. • A MIS is by definition also a DS • Connecting with independent 1- and 2-hop bridges • Slow! Works well only on UDGs; robust for general graphs Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Another Algorithm 2: Election • Every node elects a leader; every elected node goes into DS • First analyzed by Jie Gao et al. • 1 round of communication for DS only; lots of practical appeal • In the worst case very bad, even for UDGs only a √n approximation 9 2 6 8 5 4 1 7 3 Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Another Algorithm 3: Non-neighboring neighbors • If a node has neighbors who are not neighbors, join CDS • Proposed by Jie Wu et al. • Renders a CDS directly • Almost as bad as choosing all nodes, even for random UDGs • Only DS algorithm reviewed in several books • Lots of improvements, also proposed by Jie Wu et al. ? Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Another Algorithm 4: Covering connected neighbors • If higher priority neighbors are connected and cover all other neighbors, then don’t join CDS, else join CDS • This talk, inspired by an improvement of Jie Wu • 2 rounds of communication for CDS only; lots of practical appeal • In the worst case very bad, even for UDGs only a √n approximation • However, on random UDGs, this gives a O(1) approximation 9 2 6 8 5 4 1 7 3 Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Result Overview UDG = Unit Disk Graph UBG = Unit Ball Graph GBG = Growth Bounded G. /GPS = With Position Info /D = With Distance Info UDG5 quality UDG67 √n General Graph2 better Lower Bound for General Graphs9 log ? loglog GBG8 O(1) UDG4 UBG/D3 UDG/GPS1 1 2 O(log*) O(log) tx / node better Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
References • Folk theorem, e.g. Kuhn, Wattenhofer, Zhang, Zollinger, PODC 2003 • Kuhn, Wattenhofer, PODC 2003; improvement submitted • CDS improvement by Dubhashi et al, SODA 2003 • Kuhn, Moscibroda, Wattenhofer, PODC 2005 • Alzoubi, Wan, Frieder, MobiHoc 2002 • Wu and Li, DIALM 1999 • Gao, Guibas, Hershberger, Zhang, Zhu, SCG 2001 • This Talk, improving on Wu and Li • Kuhn, Moscibroda,Nieberg, Wattenhofer, submitted • Kuhn, Moscibroda, Wattenhofer, PODC 2004 Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
More Models • Random Distribution • for all geometric models • “Infocom vs. PODC” • Related Problems • e.g. (Connected) Domatic Partition Moscibroda et al., WMAN 2005 • Facility Location Moscibroda et al., PODC 2005 • Weighted Graph Models • Signal-to-Interference-and-Noise-Ratio (SINR) • Communication Models • Message Size • Unstructured Radio Network (no established MAC layer) Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Clustering for Unstructured Radio Networks • “Big Bang” (deployment) of a sensor and/or ad-hoc network: • Nodes wake up asynchronously (very late, maybe) • Neighbors unknown • Hidden terminal problem • No global clock • No established MAC protocol • No reliable collision detection • Limited knowledge of the number of nodes or degree of network. • We have randomized algorithms that compute DS (or MIS) in polylog(n) time even under these harsh circumstances, where n is an upper bound on the number of nodes in the system. • [Kuhn, Moscibroda, Wattenhofer @ MobiCom 2004] • [Moscibroda, Wattenhofer @ PODC 2005] Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Overview • Introduction • Clustering • Conclusions Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Link Layer Network Layer Services Theory/Models Clustering (Dominating Sets, etc.) MAC Layer and Coloring Topology and Power Control Interference and Signal-to-Noise-Ratio Deployment (Unstructured Radio Networks) New Routing Paradigms (e.g. Link Reversal) Geo-Routing Broadcast and Multicast Data Gathering Location Services and Positioning Time Synchronization Modeling and Mobility Lower Bounds for Message Passing Selfish Agents, Economic Aspects, Security Big Research Opportunities Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Check yourself: www.dcg.ethz.ch Reading List … Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Conclusions & Open Problems • You don’t have to do algorithms and proofs… • … but it would be good to be aware of them. • Open Problems and Research Directions • Fast good algorithm (for standard UDG) or new lower bound • Study problems for models in-between UDG and general graph • Mobility and dynamics • Study new models: e.g. SINR • Real implementations Roger Wattenhofer, ETH Zurich @ MedHocNet 2005
Questions?Comments? Thank you for your attention Roger Wattenhofer, ETH Zurich @ MedHocNet 2005