Download
1 / 7
110 likes | 201 Views
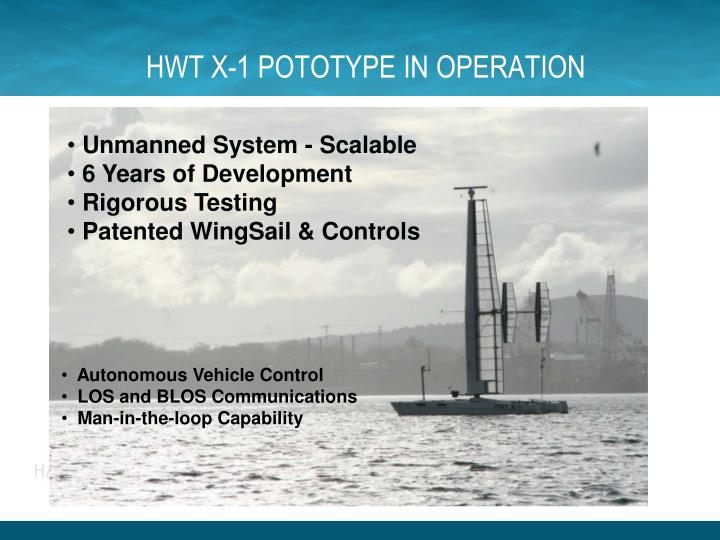
HWT X-1 POTOTYPE IN OPERATION. Unmanned System - Scalable 6 Years of Development Rigorous Testing Patented WingSail & Controls. Autonomous Vehicle Control LOS and BLOS Communications Man-in-the-loop Capability. INITIAL X-2 SENSOR CAPABILITIES. Surface Radar. Antenna LOS coms.

E N D
HWT X-1 POTOTYPE IN OPERATION • Unmanned System - Scalable • 6 Years of Development • Rigorous Testing • Patented WingSail & Controls • Autonomous Vehicle Control • LOS and BLOS Communications • Man-in-the-loop Capability
INITIAL X-2 SENSOR CAPABILITIES Surface Radar Antenna LOS coms 360 deg EO/IR Camera Acoustic Array Antenna BLOS coms • Vessel is equipped with X-band surface radar, EO/IR camera system, INU and GPS/AHRS system • Radar combined with EO/IR camera system acquires and tracks a target within 15 NM acquisition zone • Live video feed of a target is capture and is transmitted over LOS/BLOS to control station • Demonstrated Towed Acoustic Array capabilities
X-3 AUSV PRODUCTION VESSEL DESIGN Based on proven multi-hull designs • 3+ months at sea • Energy scavenging • Highly mobile platform • Flexible payload capability • Hydrofoils/split-wing for sea keeping HWT Proprietary
X-3 PERFORMANCE CHARATERISTICS • Top sailing speed 25 KTS in 15 KTS true wind speed • Top auxiliary motor speed 15 KTS • Minimum sailing speed of ¾ true wind speed under 12 KTS • Capability to sail in reverse at 5-10 KTS • Low radar cross section, Sonar, I/R, wake and magnetic signatures • Low observable profile • Covert night operations • Fully operational in up to Sea State 5 • Survivable in Sea State 8 • Sensor Capabilities • Surface Radar • Sonar/Acoustic Array • EO/IR • AIS signal tracking information • ELINT HWT Proprietary
Tracking for Moving Vessels 70 nm • Sonar range up to 15 nautical miles provides initial detection • Surface Radar range up to 15 nautical miles sweeps Sonar contact area • Close on target to 5 nautical mile EO/IR camera range • Cues other assets to intercept or track target • Stationary or roving patrol areas
RemoteTarget ISR USV Target Tracking USV Target Image • Command Ship directs AUSV search pattern • AUSV determines location and speed of target vessel • Close on target to 5 nautical mile EO/IR camera range for positive ID • Contact can be overt or covert • Command Ship remotely controls AUSV EO/IR cameras
Successful testing of X2 WingSail. Launching this fall in San Diego