Download
1 / 33
440 likes | 1.31k Views
Blade Tracking / Vibration Analysis. S64F Model Helicopter. R.A.D.S. Rotor Analysis Diagnostic System. The RADS are used for track and balance of the Main Rotor Blades and the Tail Rotor Blades. The RADS are also used for checking Engine vibrations and Engine drive shaft vibrations.

E N D
Blade Tracking / Vibration Analysis S64F Model Helicopter 8-
R.A.D.S.Rotor Analysis Diagnostic System • The RADS are used for track and balance of the Main Rotor Blades and the Tail Rotor Blades. The RADS are also used for checking Engine vibrations and Engine drive shaft vibrations. • Tracking of the Main and Tail Rotor Blades should be done anytime a Blade is changed or repaired, anytime a Head is changed or if an out of track/ balance condition is suspected. • Checking the Engine Vibration should be done anytime an engine is changed or out of limits vibration is suspected. 8-
CCMCredit Card Memory • The CCM contains all the Script files for the CADU. • Flight data can be saved to the CCM. • The CCM contains an internal battery. 8-
CADU / DAU • For all tracking and vibration measurements you will use the CADU and the DAU • The CADU is the Control and Display Unit. It contains all the controls for running the tracking and vibration programs. • The DAU is the Data Acquisition Unit, it receives all the signals from the accelerometers, magnetic rpm sensor, and camera, and sends a conditioned signal to the CADU. 8-
UTDUniversal Tracking Device Arrow Should Point In Direction of Rotation of Main Rotor Blades Glare Shield 20 8-
Magnetic RPM Sensor Cannon Plug Sensor Face 8-
Accelerometer Contact Surface Cannon Plug 8-
Optical RPM Sensor LED Indicates Power to sensor 8-
RADS Panel POWER SUPPLY TO DAU RADS COMPONENTS TO DAU 8-
Tracking the MRH • Track and Balance on the MRH requires the CADU, DAU, UTD, the Magnetic RPM Sensor, and two Accelerometers. • Install the Magnetic Sensor and Bracket forward of the stationary scissors. Install the interrupter on the trailing side of the Red blade control rod where it attaches to the rotating swash plate. Connect the magnetic sensor cable to the sensor. Ensure that there is enough slack in the cable to allow for full collective movement. • Attach the UTD with sunshield to the bracket on the Nose of the aircraft. Ensure that the UTD is at 75º from horizontal. Attach cable between UTD and aircraft. • The UTD functions on a light/dark contrast. To increase the success rate, it is important to paint the underside of the rotor blades with black paint. Apply a consistent coat of paint to the leading edge of the blade at pockets two through eight. 8-
MRH Magnetic Sensor and Interrupter Interrupter Mag Pickup 8-
Nose Camera Mount 75º Angle 8-
Tracking the MRH • Install the accelerometers on the cockpit step. Ensure that one of the accelerometer connectors points to the left, and one points up. • Attach the lateral accelerometer to DAU ACC 1 and the vertical accelerometer to DAU ACC 2. • The aircraft is pre-wired for the remaining connections. The cables run from the individual components to the RADS panel in the cockpit. The RADS harness is attached to the Panel and the DAU, the CADU is plugged into the DAU. Aircraft power 28 VDC is connected to the DAU from the RADS panel. 8-
Accelerometers for MRH Cannon Plugs Should Point Up and to the Left 8-
Tracking the MRH • Now that all the components are connected the CADU needs to be set up for the desired measurements. • Select the aircraft type = S64Etl 7.02, S64E 7.00, FFT 7.1, ENG1DS 7.04, ENG2DS 7.04: MRH = S64F 7.00 • Select the tail number = 173AC, 154AC • Select the flight plan= Varies by aircraft type selected. MRH = Flight • Press F1=Measure • Now you are ready to track the MRH. The MRH track has four flight configurations for tracking. • FPG100 = 100% NR on the ground • Hover = Hover (no load) • 80K = 80 knots Level Flight • 105K = 105 knots Level Flight (VNE) • Select the flight configuration to test and press DO 8-
Tracking the MRH • When the aircraft is in the correct flight mode for the selected track (verified by the pilot), push DO. The CADU will go through a self test mode and then ask if you are ready to measure, push DO again. • When the CADU indicates it has successfully measured with the words “Processing Data” inform the pilot to proceed to the next flight condition to be measured. • Once all of the conditions have been measured you may view the data by pressing F2(DISPLAY) or have the CADU initiate a diagnostic solution (corrections) by pushing F3(DIAGS). • Make adjustments to the Track as required. • Repeat the flight plan as many times as required to achieve an acceptable track. 8-
Adjusting the MRH per CADU Information • Adjustments to the MRH track are made on the individual blade pitch change link. Lengthening the PC link adds pitch to the blade causing it to fly in a higher track. Shortening the PC link removes pitch from the blade causing it to fly in a lower track. • The CADU gives corrections for track in positive and negative numbers. • The recommended adjustments take into consideration the track and the ips. (vertical / lateral vibration). • Ips = inches per second. 8-
PC Link Adjustments Moving Key One Slot is Approximately ½ inch (1.27 cm) of Blade Tip Movement Jam Nut 8-
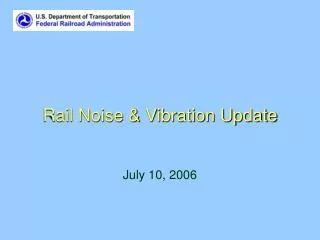
Tracking the TRH • Tracking the Tail Rotor Head requires the CADU, DAU, TRH magnetic pickup, and two accelerometers. • The Magnetic pickup is mounted to a bracket on the top of the Tail Rotor Gear Box at the 12 O’clock position. The interrupter is mounted on the Tail Rotor Hub at the Red Blade position. There should be a gap of 0.022 to 0.024 inch (.056 to .061 cm) between the face of the Mag pickup and the interrupter. • The accelerometers are mounted on a block attached to a Tail Rotor Gear Box housing bolt. One accelerometer is mounted vertical with the cannon plug on top. The other accelerometer is horizontal with the cannon plug outboard toward the Tail Rotor Head. 8-
Tail Rotor Components Interrupter Mount Red Blade Accelerometers Magnetic Sensor Top View Looking Down 8-
Tracking the TRH • The Tail rotor is also hard wired for the RADS. Attach RADS harness and 28vdc power cord from the RADS panel in the cockpit to the DAU, attach DAU to CADU. • To set up the CADU for tracking the Tail is similar to the MRH. • “Aircraft Type” select S64tl 7.02 • “Tail Number” select aircraft number- I-CFAG • “Flight Plan” Has three options • TSPECTRM (NOT USED) • T-FLT includes T-GND and T-FLT • T-GND 8-
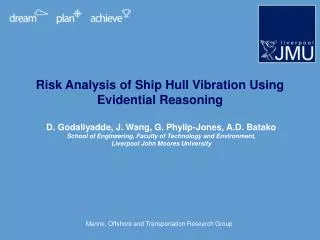
Tracking the TRH Direction of Rotation Target • The first Shot of the Tail should be with T-GND, this is for the balance (Radial). Add weights until acceptable ips are acquired (0.2 ips (52 cmps)). • The RADS will indicate which Blade to adjust or add weight to. The blades are listed as “TARGET, 2, 3, 4” not by blade colors. • TARGET is the blade with the interrupter on it ( RED) • 2,3,4 are the blades following the target blade in order. #4 #3 #2 8-
Tracking the TRH • Now select T-FLT, there are two flight configurations. T-gnd and T-100k. Measure the T-gnd on the ground 100% and then measure T-100k in flight at 100 knots level flight. • The adjustments for T-FLT will be given in ±PC link flat increments, this will adjust the Axial vibration. Adjust the PC link Flats until an acceptable ips is acquired (0.2 ips, or .51 cmps). • Once T-FLT is within limits, take another measurement with T-GND. Add weights as per indicated by RADS to bring ips to acceptable level 0.2 ips (.51 cmps. • The TRH is now balanced. By making the T-GND and T-FLT measurements you are ensuring that the vibrations are minimal in flight and on the ground. This will save wear and tear on the horizontal mount bushings and the tail rotor components. 8-
Vibe Checking the Engine • A vibe check should be done on the engine any time a component is changed or there is a suspected vibration. • To vibe check the engine you need the CADU, DAU, and 1 accelerometer. • Attach the power supply line from the DAU to the RADS Panel and plug the accelerometer into channel ACC 4 on the DAU with a cord long enough to reach all the engine measure points. • To set up the CADU • Aircraft Type – select S64F 7.00 • Tail Number I-CFAG • Flight plan – F_VIB1 • Flight I.D. – (Blank) 8-
Vibe Checking the Engine • When A/C at 100% press Measure, A screen with 5 measurements on it will appear. • #1_ICV = Inlet Compressor Vertical • #1-ICH = Inlet Compressor Horizontal • #1-GbV = Gearbox Vertical • #1- CCH = Combustion Chamber Horizontal • #1-FTH = Free Turbine Horizontal ICV ICH FTH CCH GbV 8-
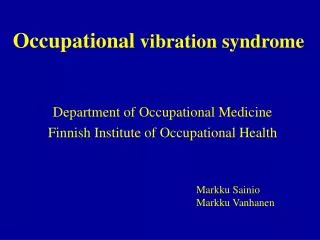
Vibe Checking the Engine • Place the accelerometer on the corresponding block and press do. Measure all five positions, making sure that the accelerometer is in the correct location for each measurement. Note: You will be holding the accelerometer in position by hand, verify that accelerometer face is held flush and tight against the mount block. Wear Gloves the engine gets hot. • To view measurements press F2 Display and select measurement to view. Move the cursor to the proper RPM for component. ICV, ICH, GbV, CCH all at 12,680 RPM and the FTH is a rotating at 9000 RPM. ENGINE VIBE LIMITS • Initial vibe after installation not to exceed 1.2 mils peak • Normal operation vibe not to exceed 1.5 mils peak • The RADS displays the vibration in ips. You can change the setting to Mills, or use the following chart. 8-
Engine Vibration Acceptance Chart h h 2.0 IPS 1.4 IPS 9000 RPM 12680 RPM 8-
Vibe Checking the High Speed Shaft • A vibe check should be done anytime a new HSS is installed or the Free Turbine is above limits. • Vibe checking the High Speed Shaft requires the DAU, CADU, optical pickup and bracket, and two accelerometers. • Mount the Optical pickup bracket at the 6 O’clock position on the 5th mount to MGB flange. Install sensor in bracket and route wire to DAU position TACH 2. • Mount the accelerometer bracket on the 5th mount Free turbine flange. On the #1 Engine mount at the 3 O’clock position. On the #2 Engine mount at the 9 O’clock position. Attach wire to DAU position ACC #3 • Mount the second accelerometer and bracket to the Free Turbine at the existing Vibe Bracket position. Attach wire to DAU position ACC #4. 8-
HSSBalance Adjustment Hole #1 Reflective Tape Direction of Rotation Optical Eye and Bracket 5TH Mount Accelerometer 8-
Vibe Checking the High Speed Shaft • Mark the HSS with reflective tape and label the adjustment holes #1, #2, #3 in the direction of rotation. • The reflective tape should be 1 ½ to 2 inches (3.81 to 5.08 cm) and inline with the #1 adjustment hole. Reflective Tape in Line With Hole #1 8-
Vibe Checking the High Speed Shaft • Set-up the CADU like the other Track and Balance, select “ENG1DS 7.03” for the #1 engine and “ENG2DS 7.03” for the #2 engine. • Run Engine at 100% N2 and measure SHFBAL. • To view HSS vibe and corrections press F3. • Corrections will be displayed with the amount of weight to add or remove and from which bolt (TARGET, #2, #3). CAUTION: Remove one nut at a time and re-torque to 960 in/lbs (108 Nm). Before moving to the next adjustments. Failure to do this will void your results and corrections. 8-