Download
1 / 29
310 likes | 598 Views
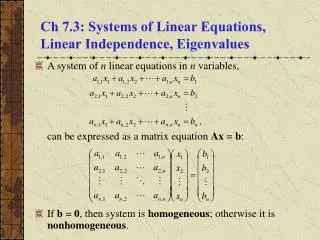
6.3 Linear Independence, Dimension. “Better” Spanning Sets. For a vector space, there may be a number of different spanning sets. For instance, the entire set V is a spanning sets. In the interest of efficiency, we would like to find a spanning set with as few vectors as possible.

E N D
“Better” Spanning Sets • For a vector space, there may be a number of different spanning sets. For instance, the entire set V is a spanning sets. • In the interest of efficiency, we would like to find a spanning set with as few vectors as possible. • We would like to find spanning sets which have the property that there is only one way of representing any vector in V with a linear combination of vectors in the spanning set (vectors in spanning set called linearly independent). • Interestingly, if we can find a spanning set which has only one way of representing the zero vector, we have found such a linearly independent spanning set.
Formal Definition A set of vectors {v1,v2,…,vn} is called linearly independent if it satisfies the following condition: If s1v1 + s2v2 + … + snvn = 0 --> s1=s2=…=sn=0 Otherwise, the set is called linearly dependent (I.e. If we can only represent the 0 by the trivial linear combination: 0v1 + 0v2 + … + 0vn and no other way, then we have a linearly independent set.
Example Show that {(1,-1,0),(0,-1,2),(2,1,1)} in 3 is linearly independent. s1(1,-1,0) + s2(0,-1,2) + s3(2,1,1) = (0,0,0) Show that s1,s2,s3 must all be 0 (will be a system of 3 equations with 3 unknowns).
Example 2 Show that (1+x, 3x+x2, 2+x-x2) is linearly independent in P2. s1(1+x) + s2(3x + x2) + s3(2 + x -x2) = 0 s1 + s1x + 3s2x + s2x2 + 2s3 + s3x - s3x2 = 0 s1+ 2s3=0 s1+3s2 + s3 = 0 s2 - s3 = 0 solve and show that s1=s2=s3 = 0
Example 3 Show that {sin x, cos x} is linearly independent in the vector space F[0,2] s1 sin x + s2 cos x = 0 must be true for every x in [0,2]. If x = 0, s2=0 If x = /2, then s1=0, so s1=s2=0
Example 4 If {u,v} is linearly independent, show that {u+v,u-v} is too. s1(u+v) + s2(u-v) = 0 (s1 + s2) u + (s1- s2) v = 0 Since {u,v} is linearly independent, s1 + s2 = 0 and s1-s2=0 --> s1=s2=0.
Example 5 If v≠0, the set {v} consisting of only one vector is linearly ind. sv = 0 --> s = 0 since v≠0
Example 6 If {v1,v2,…,vn} is linearly independent in a vector space V, show that {a1v1, a2v2,…,anvn} is also linearly independent if a1,a2,…an are all non-zero. s1a1v1 + s2a2v2 + … + snanvn = 0 Since {v1,v2,…,vn} is linearly independent, s1a1=s2a2=…=snan=0 And since a1,a2,…an are all non-zero, s1=s2=…=sn=0
Example 7 Show that no linearly independent set of vectors can contain the zero vector. 10 + 0v1 + 0v2 + … + 0vn = 0 which is a non-trivial linear combination.
Theorem 1 A set {v1,v2,…,vn} of vectors in vector space V is linearly dependent iff some vi is a linear combination of the others. Proof: --> Given the set in linearly independent, Then a1v1 + a2v2 + … + anvn = 0 where some coeff, say a1 ≠ 0 Then a1v1 = -a2v2 - … - anvn So v1 = (-a2/a1)v2 + … + (-an/a1)vn - a linear combo of other v’s
Theorem 1 Proof (cont) <-- Given v1 is a linear combination of the other v’s: v1 = a2v2 + … + anvn So 1v1 - a2v2 + … + anvn = 0 a non-trivial linear combination
Geometric Interpretation • Let u and v be nonzero vectors w/ initial points at origin. • Theorem 1 tells us that {u,v} is linearly dependent iff one is a scalar multiple of the other, (i.e. iff they are parallel). • So {u,v} is linearly independent iff u,v nonparallel in which case span {u,v} is the plane through the origin containing u and v • Likewise, {u,v,w} is linearly dependent iff one is a linear combination of the others which happens geometrically iff one is a scalar multiple of another (parallel) or a linear combination of the other 2 (would have to be in the same plane then) • If {u,v,w} is linearly independent, the vectors must span a 3-dimensional space. (draw)
Theorem 2 Let {v1,v2,…,vn} be a linearly independent set of vectors in a vector space V. If a vector v has representations, v = s1v1 + s2v2 + … + snvn v = t1v1 + s2v2 + … + snvn as linear combinations of the other vectors, then s1=t1,…,sn=tn Proof: s1v1 + s2v2 + … + snvn =t1v1 + s2v2 + … + snvn (s1-t1)v1 + … + (sn-tn)vn = 0 Since {v1,v2,…,vn} are linearly independent, (s1-t1)=…= (sn-tn)=0 So s1=t1,…,sn=tn.
Theorem 3 - Fundamental Theorem Suppose a vector space V can be spanned by n vectors. If any set of m vectors is V is linearly independent, then m ≤ n. Proof: Let V = span {v1,v2,…,vn}. We need to show that every set {u1,u2,…,um} of vectors in V with m > n is not linearly independent. We can do this by showing that we can find x1,x2,…,xn not all zero such that
Theorem 3 (cont) Since V = span {v1,v2,…,vn}, each vector ujcan be expressed as a linear combination of the v’s: We can substitute uj’s into previous equation:
Theorem 3 (cont) This is true if all the coefficients of the v’s are zero: for each i. This is a system of n equations with m variables (xj’s). Since m > n, (more variables than equations), it has a non-trivial solution (in fact infinitely many). Since there is a non-trivial solution, the u’s are linearly dependent.
Definition A set {e1,e2,... ,en} of vectors in a vector space V is called a basis of V if it satisfies the following 2 conditions: 1. {e1,e2,…,en} is linearly independent 2. V = span {e1,e2,…,en} Basically saying that this is the “most efficient” or smallest set which spans V. Also, every vector in V can be written as a linear combination of the e vectors in a unique way (by Thm 2). And any two bases of V contain the same number of vectors. (proven in Theorem 4)
Theorem 4 Let {e1,e2,…,en} and {f1,f2,…,fm} be two bases of a vector space V. Then n=m. Proof: Since V = span {e1,e2,…,en}, and the m f’s are linearly independent, m ≤ n (by Thm 3). Also, since V= span {f1,f2,…,fm}, and the n e’s are linearly independent, n ≤ m (by Thm 3). So n = m.
Definition If {e1,e2,…,en} is a basis of the nonzero vector space V, the number, n, of vectors in the basis is called the dimension of V (dim V = n). The zero vector space, V = 0, is defined to have dimension 0: dim 0 = 0 A vector space V is called finite dimensional if V = 0 or V has a finite basis.
Example Show that dim n = n and that {e1,e2,…,en} is a basis where e1=(1,0,…,0), e2=(0,1,0,…,0),…,en=(0,…,0,1) (the standard basis for n) Proof: We showed in section 2 that n = span{e1,e2,…,en}. Also, a1e1+ a2e2+…+anen = 0 implies a1=a2=…=an = 0 : So the e’s are linearly independent and thus a basis, so dim n = n.
Example The space Mmn has a basis with (mn) different (m x n) matrices each having a different entry that is a 1, and all other entries 0. The dimension is therefore mn.
Example Show that dim Pn = n + 1 and that {1,x,x2,…,xn} is a basis. Proof: We know that Pn = span {1,x,x2,…,xn}. Also, if a01 + a1x + … + anxn = 0, then each term must be zero, so a0 = a1 = … = an = 0. So both a spanning set and linearly independent. Therefore, a basis, and dim Pn = n+1
Example If v ≠ 0, is any nonzero vector in a vector space V, show that span {v} = v has dimension 1. Proof: {v} clearly spans v. {v} is also linearly independent. So {v} is a basis of v and dim v = 1
Example U = {X in M22 | AX = XA}, a subspace of M22 Show that dim U = 2 and find a basis of U. We showed earlier that So each matrix, X, in U is So U = span B where We could also show that B is linearly independent and thus a basis. So dim U = 2.
Example Show that the set V of all symmetric (2 x 2) matrices is a vector space, and find the dimension of V. Proof: This is clearly a subset of M22, so we just show that it is a subspace. 1. It include the 0 element: O22 2. (A + B)T= AT+BT = A + B (since A, B symmetric) 3. (kA)T = kAT = kA (since A symmetric) so subspace
Example (cont) So B spans V. We could also show that B is linearly independent, and is thus a basis. So dim V = 3
Theorem 5 Let V be a vector space and assume that dim V = n > 0 1. No set of more than n vectors in V can be linearly independent. 2. No set of fewer than n vectors can span V. Proof: since dim V = n, V can be spanned by n vectors, so (1) follows directly from the fundamental theorem (2): since dim V = n, n vectors form a basis, and these n vectors are all linearly independent. Say {a1,a2,…,an} is a basis for V and we eliminate one vector, a1, to make a set of fewer than n vectors. a1V, but no linear combination of {a2,…,an} will give a1 since {a1,a2,…,an} is linearly independent. Therefore, no smaller set can span V.
Example A is (n x n). Show:there exist n2 + 1 real numbers (a’s below) which are not all zero such that: We showed earlier that dim Mnn = n2 So the n2+1 matrices above cannot be linearly independent, so the trivial solution is not the only solution above.