Download
1 / 1
10 likes | 78 Views
Real Time Windows Target Toolbox. Real Time Workshop. Generated C Code. PCI Card. Interface Board. DC Motor. Simulink. xPC Target Toolbox. Real Time Workshop. Generated C Code. xPC Kernel. PCI Card. Interface Board. Block Diagram of Real Time Windows Target Design. Host PC.

E N D
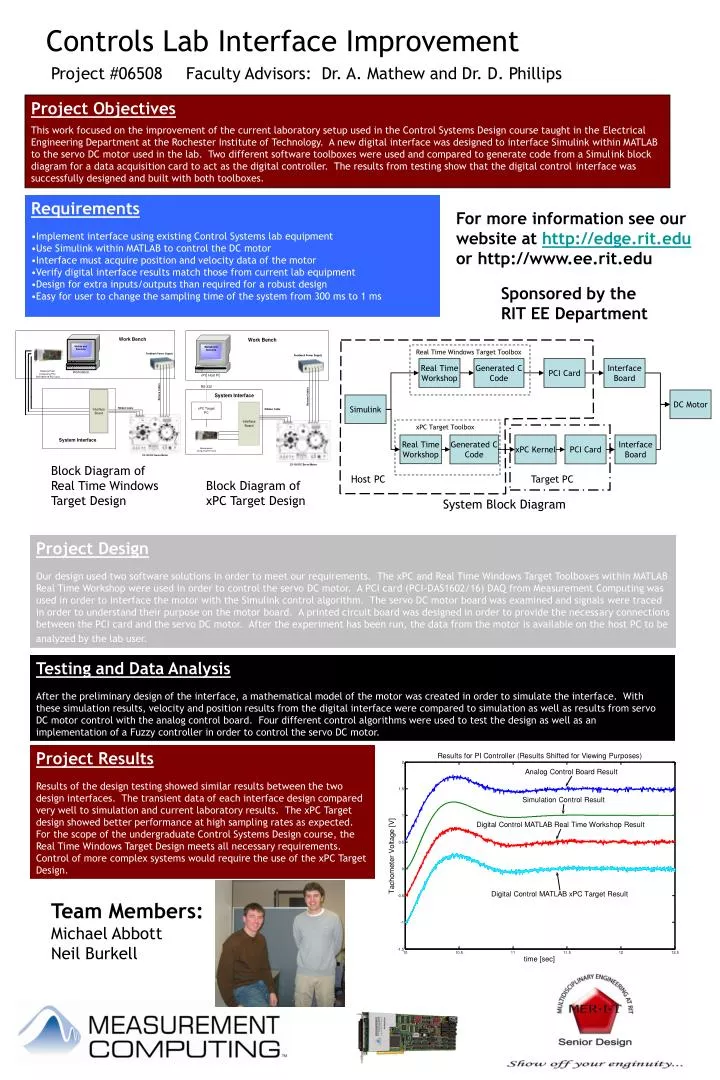
Real Time Windows Target Toolbox Real Time Workshop Generated C Code PCI Card Interface Board DC Motor Simulink xPC Target Toolbox Real Time Workshop Generated C Code xPC Kernel PCI Card Interface Board Block Diagram of Real Time Windows Target Design Host PC Target PC Block Diagram of xPC Target Design System Block Diagram Controls Lab Interface Improvement Project #06508 Faculty Advisors: Dr. A. Mathew and Dr. D. Phillips Project Objectives This work focused on the improvement of the current laboratory setup used in the Control Systems Design course taught in the Electrical Engineering Department at the Rochester Institute of Technology. A new digital interface was designed to interface Simulink within MATLAB to the servo DC motor used in the lab. Two different software toolboxes were used and compared to generate code from a Simulink block diagram for a data acquisition card to act as the digital controller. The results from testing show that the digital control interface was successfully designed and built with both toolboxes. • Requirements • Implement interface using existing Control Systems lab equipment • Use Simulink within MATLAB to control the DC motor • Interface must acquire position and velocity data of the motor • Verify digital interface results match those from current lab equipment • Design for extra inputs/outputs than required for a robust design • Easy for user to change the sampling time of the system from 300 ms to 1 ms For more information see our website at http://edge.rit.edu or http://www.ee.rit.edu Sponsored by the RIT EE Department Project Design Our design used two software solutions in order to meet our requirements. The xPC and Real Time Windows Target Toolboxes within MATLAB Real Time Workshop were used in order to control the servo DC motor. A PCI card (PCI-DAS1602/16) DAQ from Measurement Computing was used in order to interface the motor with the Simulink control algorithm. The servo DC motor board was examined and signals were traced in order to understand their purpose on the motor board. A printed circuit board was designed in order to provide the necessary connections between the PCI card and the servo DC motor. After the experiment has been run, the data from the motor is available on the host PC to be analyzed by the lab user. Testing and Data Analysis After the preliminary design of the interface, a mathematical model of the motor was created in order to simulate the interface. With these simulation results, velocity and position results from the digital interface were compared to simulation as well as results from servo DC motor control with the analog control board. Four different control algorithms were used to test the design as well as an implementation of a Fuzzy controller in order to control the servo DC motor. Project Results Results of the design testing showed similar results between the two design interfaces. The transient data of each interface design compared very well to simulation and current laboratory results. The xPC Target design showed better performance at high sampling rates as expected. For the scope of the undergraduate Control Systems Design course, the Real Time Windows Target Design meets all necessary requirements. Control of more complex systems would require the use of the xPC Target Design. Team Members: Michael Abbott Neil Burkell