Download
1 / 61
830 likes | 1.79k Views
Numerical Methods in Electrical Engineering. Professor David Thiel Centre for Wireless Monitoring and Applications Griffith University, Brisbane Australia. Purpose. This is a follow-on workshop from the Optimization workshop. The aim is to introduce two methods of electromagnetic modelling:

E N D
Numerical Methods in Electrical Engineering Professor David Thiel Centre for Wireless Monitoring and Applications Griffith University, Brisbane Australia
Purpose • This is a follow-on workshop from the Optimization workshop. • The aim is to introduce two methods of electromagnetic modelling: • The Method of Moments (MoM): frequency domain, open boundaries. • The Finite-Difference Time-Domain (FDTD): time domain, closed boundaries. • To outline the validation processes essential to obtaining reliable solutions.
My interest? • I wished to solve some fundamental problems in electromagnetic geophysics where subsurface targets were small and the earth was both highly conductive and semi-infinite. • I have worked with many numerical EM techniques including • MoM • FDTD • Impedance method • FEM • FDM • Spice (Circuit simulator)
Topics • Overview of Numerical Modelling for electromagnetics. • The Method of Moments. • The Finite-Difference Time-domain method. • Review.
Topic 1 Overview of the Modelling Process
Why numerical modelling? • To reduce the number of prototypes constructed. • To use as the forward solver in an optimization routine to gain the best possible design.
What are the alternatives? • Design and build lots of physical models • Time consuming • Expensive • Measurement difficulties (cables, calibration, mechanical precision, interference, mutual coupling, field confinement, etc) • Analytical solutions • Limited to simple models because of the computational complexity
But for Verification …. • You MUST make a physical model! • You MUST undertake some simple theoretical modelling for use in your numerical modelling analysis! • If you don’t, you have no verification of your model and the results are not acceptable for publication! • This is true EVEN if you use “proven” commercial software.
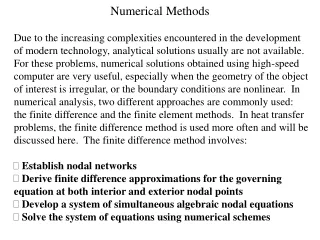
Numerical Modelling Procedure • Select/write your numerical modelling code. • Find a simple analytical model and divide into segments/pixels/voxels. • These MUST have every dimension less than l/10 where l is the wavelength in the material being modelled. (Note that this is NOT the free space wavelength).
Let’s do the calculation of l • The complex propagation coefficient g is given by the equation where • s is the conductivity, • e is the absolute permittivity, • m is the absolute magnetic permeability, • w is the angular radiation frequency, and j is the imaginary number, • a is the attenuation constant • b is the phase constant
The wavelength in the material • At this frequency we have • The wavelength depths on the electromagnetic properties of the material. • Remember NO segment/pixel/voxel can be larger than in any dimension l/10. • This can make life very difficult when you have electrically large conductive materials.
Solution • MoM and FDTD both use perfectly conducting materials. • To introduce finite conductivity, we can use lumped impedance elements.
Modelling process • Enter the model • Pre-processing: Divide the model into segments/pixels/voxels. You need to know the coordinates of very line and corner. • Apply the solver • Post-processing: Extract the important parameters (gain, front to back ratio, beam width, bandwidth, input impedance, radiation pattern, near-field strength etc)
Numerical Modelling Procedure • Select/write your numerical modelling code. • Find a simple analytical model and divide into segments/pixels/voxels. • Solve the simple model analytically and numerically. • Compare your solutions. • Alter the segments/pixels/voxel size and recalculate the numerical model.
Standard numerical modelling test • Recalculate use different sized segments/pixels/voxels. • Do not use a factor of 2, 5 or 10. • Why? • To ensure that your modelling routine is robust • To assess what accuracy is needed to get good results • To minimize the number of segments/pixels/voxels in the model to reduce the computational time and the memory requirements.
Numerical Modelling Procedure • Enter your full model and check results. • Alter the segments/pixels/voxel size and recalculate the numerical model. • Only when you have robust answers can you conclude that the model is correct. • It is often a good idea to re-enter the model to ensure conductor connectivity, no air gaps, etc.
Reducing the model size • Look for one or more lines of symmetry and apply a boundary (perfect conductor or perfect magnetic conductor). • One line of symmetry can halve the computational effort. • For circular or cylindrical symmetry, you can change a 3D problem to a 2D or 1D problem.
Topic 2 The Method of Moments
Background • Numerical technique used to solve integral equations. • The model common code is the Numerical Electromagnetics Code (NEC) developed at Lawrence Livermore Laboratories to check the effect of EMP on antennas. • Originally created in the 1980’s, NEC2 is freely available. • Now commercially available in more user-friendly form. • The method is always in 3D.
MoM Basics (1) • The model is constructed of infinitely thin, perfectly conducting wires. • To construct a plane, you need a 2D intersecting grid of wires. • To construct a volume, you need a 3D intersecting grid of wires. • To add loss, each segment must contain a lumped impedance resistance.
MoM Basics (2) • To account for finite radius, a perturbation technique is used in the code – BUT, the current on the wire is always axially symmetric. • If this approximation is not good enough, you need to construct a cylindrical grid of wires to represent the conductor of finite diameter.
MoM Basics (3) • You must add at least one source (voltage or current) to one of the conducting segments to provide energy to the system. • NEC2 provides an option for calculations in free space or calculations in the vicinity of a ground plane (infinite extent but finite or infinite conductivity). • The ground plane calculation is done using image theory and the Sommerfeld surface wave (if selected).
MoM Basics (4) • The MoM computational engine places all conductive segments in a matrix and calculates the induced current in every segment using mutual coupling equations. • The current on a single straight wire is fitted by a basis function which smooths the current transition between segments • The near electric field, the near magnetic field and the electromagnetic far field (radiated field) is calculated using the standard Hertzian dipole formulation.
Pitfalls: Inaccurate results if • Wire segments are too long then incorrect results (phase errors). • Wire segments are too short then incorrect results (truncation errors). • Wire segments are too close and not connected (axial symmetry is not a valid approximation).
Pitfalls: Inaccurate results if • The feed point(s) is not on a conducting segment. • The wires do not exactly meet. An air gap is a major problem.
NEC code • The code was designed for computer card entry. • Each line contains one piece of information. • Most codes have a user-friendly interface and the codes are created semi-automatically.
z q y f x NEC Coordinate System The xoy plane (z = 0) is where the ground plane is located if used.
Coding Examples • Comment Cards • CM comments - can only be at the start of the program • CE end comments - only one required.
Coding Examples • Structure Geometry Cards • GA wire arc specification • GE end geometry - 0 means no ground plane • GF use numerical Green's function • GM shift and duplicate structure • GR generate cylindrical structure (symmetry) • GS scale structure dimensions - 0, 0, 1 • GW specify wire - number, number of segments in wire, x1,y1,z1, x2, y2, z2, radius • GX reflect structure • SP specify surface patch • GH generate helix
Coding Cards • Program control cards • FR frequency specification - 0, # of steps, 0, 0, start f, Df • GN ground parameter specification - 0 for free space, 1 for perfect gnd, 2 finite gnd • LD structure impedance loading - 0 series RLC or 1 parallel RLC, wire #, start seg #, end seg #, R, L, C • EX structure excitation - 0, wire #, segment #, 00, volts real, volts imag • NT two-port network specification • TL transmission line specification • EN end of data flag • GD additional ground parameter specification • NE near electric field request • NH near magnetic field request • RP radiation pattern - 0, # of q steps, # of f steps, 1000, q start, f start, Dq, Df
Coding Example NEC Coding example: Dipole antenna in free space CM Simple dipole antenna in Free Space CM Optimized for resonance at 300 MHz CE GW 1, 9, 0, -.2418, 0, 0, .2418, 0, .0001 GS 0, 0, 1 GE 0 EX 0, 1, 5, 0, 1, 0 FR 0, 1, 0, 0, 300, 1 RP 0, 181, 1, 1000, -90, 0, 1, 1 RP 0, 1, 360, 1000, 90, 0, 1, 1 EN
MMANA • http://www.smeter.net/antennas/mmana-tutorial.php • This is based on Mininec – a preNEC program which is very efficient computationally.
References • Iskander, M.F., 1992. Electromagnetic fields and waves, Prentice Hall. (Section 4.9) • Harrington, R.F., 1993. Field computation by moment methods, IEEE Press. • Guru, B.S., and Hiziroglu, H.R., 1998. Electromagnetic field theory and fundamentals. PWS Publishing Company. pp. 530-533. • NEC manual. (on the web) • Sadiku, N.O., 1992. Numerical Techniques in Electromagnetics, CRC Press. (Section 3.8, Chapter 5)
Topic 3 Finite-Difference Time-Domain
Background • Method was developed by Yee in 1966 to perform a direct solution of Maxwell’s equations. • Using a Finite-difference scheme for Maxwell’s equations, the method calculates the magnetic and then the electric field components through space containing the objects(s) after each time step.
Background • By directly calculating electric and magnetic fields through space, the technique inherently includes all EM phenomena including: • Surface waves • Far field values (Radiated waves) • Near field values • Mutual coupling
Background • By recording the time dependent field strength at various places in the solution space, it is possible to calculate parameters such as: • Input impedance • Radiation pattern • Reflection coefficients • Effective dielectric constant
Background • The system of equations can be solved in 1D (a line), 2D (a surface) and 3D.
Applications • All electromagnetic systems including • EM Couplers • Antennas • UWB systems • Radar crossection • Discontinuities in transmission lines (microstrip lines, waveguides, etc) • electromagnetic geophysics • etc
Basic formulation • The differential form of Maxwell’s equations are solved using the central difference formulation of the partial differential operator. • If u is a field (H or E), then
2D equations TM case TE Case
1D equations TM case TE case
The E and H fields are not calculated at exactly the same point so the time at which the calculations are performed must reflect this. • ChoseE and H to be offset by Dx/2 and so the time spacing between theEand H calculations must be Dt/2. We must therefore write the equation as:
Leap-frog stepping • E is calculated in the half spaces (i+1/2) and at integer time (n). • H is calculated in the integer spaces (i) and at half times (n+1/2).
t n+1 n+1/2 n n-1/2 n-1 E field H field x i-1 i-1/2 ii+1/2 i+1 Leap-frog stepping – update equations
Source Field • This is a time domain method so need a time domain source. • Simple source is a Gaussian pulse • The pulse is centred at time n0 and has a 1/e decay constant of ndecay time steps. The source field is given by: