Download
1 / 3
230 likes | 896 Views
(Rigid shaft). z 1. in shaft 2:. B y. 4. 3. J m , B m. J L. 2. 1. 2. B. +. V k. K 2. Motor. -. z 2. R a , L a. K i , K b. : Motor ’s current. F. r. 7. Modeling of Electromechanical Systems. Example 7.1 System with DC Motor.

E N D
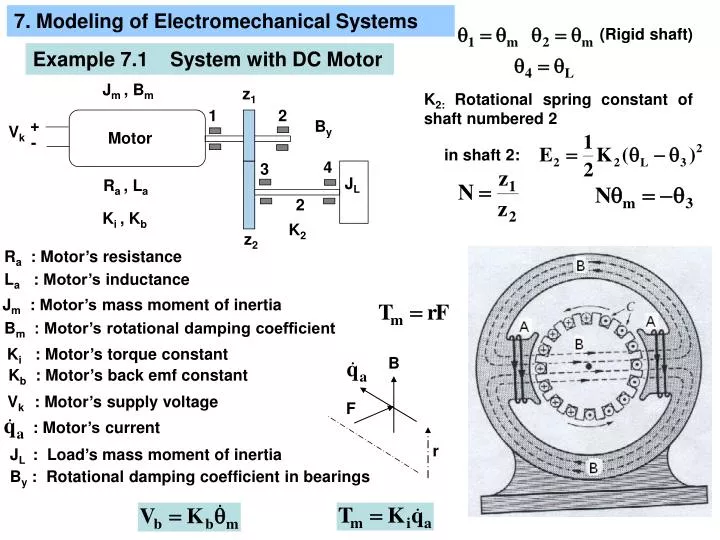
(Rigid shaft) z1 in shaft 2: By 4 3 Jm , Bm JL 2 1 2 B + Vk K2 Motor - z2 Ra , La Ki , Kb : Motor’scurrent F r 7. Modeling of Electromechanical Systems Example 7.1 System with DC Motor K2: Rotational spring constant of shaft numbered 2 Ra : Motor’s resistance La : Motor’s inductance Jm : Motor’s mass moment of inertia Bm : Motor’s rotational damping coefficient Ki : Motor’s torque constant Kb : Motor’s back emf constant Vk : Motor’s supply voltage JL : Load’s mass moment of inertia By : Rotational damping coefficient in bearings
(Rigid shaft) z1 In shaft 2 : By 4 3 Jm , Bm JL 2 1 2 + Vk K2 DC Motor - z2 Ra , La Ki , Kb Lagrange Equation→ Homework 07-Problem 1 Energy equations for Lagrange equation: Input : Vk ;Generalized variables : qa, θm, θL
x(t) k/2 Movable, m R b/2 Vk - + fa(t) C k/2 b/2 Sabit Example 7.2 Movable plate capacitor Inputs: Vk(t) ve fa(t) Generalized variables: q(t) ve x(t) Lagrange equation→ Set of non-linear differential equations Runge-Kutta method Linearization Homework 07- Problem 2: Movable core inductance