Download
1 / 31
320 likes | 519 Views
ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΣΥΣΤΗΜΑΤΩΝ - ΧΕΙΡΙΣΤΣΕΣ ΔΕΔΟΜΕΝΩΝ. Ένα ψηφιακό σύστημα αποτελείται από μονάδες που κάθε μια εκτελεί συγκεκριμένες λειτουργίες Οι μονάδες αυτές συνθέτονται ιεραρχικά από κυκλώματα που εκτελούν στοιχειώδεις λειτουργίες (καταχωρητές, μετρητές, πολυπλέκτες, αθροιστές κ.α)

E N D
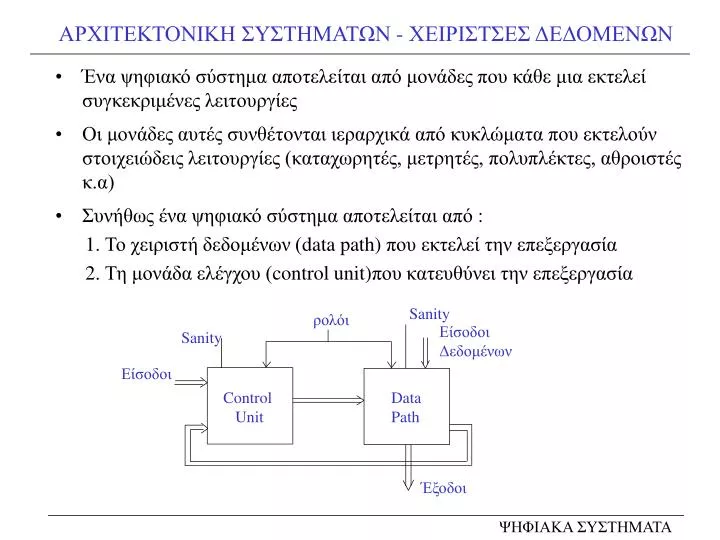
ΑΡΧΙΤΕΚΤΟΝΙΚΗ ΣΥΣΤΗΜΑΤΩΝ - ΧΕΙΡΙΣΤΣΕΣ ΔΕΔΟΜΕΝΩΝ • Ένα ψηφιακό σύστημα αποτελείται από μονάδες που κάθε μια εκτελεί συγκεκριμένες λειτουργίες • Οι μονάδες αυτές συνθέτονται ιεραρχικά από κυκλώματα που εκτελούν στοιχειώδεις λειτουργίες (καταχωρητές, μετρητές, πολυπλέκτες, αθροιστές κ.α) • Συνήθως ένα ψηφιακό σύστημα αποτελείται από : 1. Το χειριστή δεδομένων (data path) που εκτελεί την επεξεργασία 2. Τη μονάδα ελέγχου (control unit)που κατευθύνει την επεξεργασία Sanity ρολόι Είσοδοι Δεδομένων Sanity Είσοδοι Control Unit Data Path Έξοδοι ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΧΕΙΡΙΣΤΣΕΣ ΔΕΔΟΜΕΝΩΝ • Καλύτερη περιγραφή των χειριστών δεδομένων γίνεται από τους καταχωρητές τους και τις λειτουργίες που πραγματοποιούνται στα περιεχόμενά τους • Οι μετακινήσεις δεδομένων καταχωρητών και η επεξεργασία αυτών καλούνται λειτουργίες μεταφοράς καταχωρητή (Register Transfer Level operations, RTL) • Οι λειτουργίες αυτές προσδιορίζονται από: 1. Τη θέση των καταχωρητών 2. Το είδος της επεξεργασίας των δεδομένων 3. Τον έλεγχο που επιβλέπει τη σειρά των λειτουργιών • Εν γένει κάθε καταχωρητής μπορεί να πραγματοποιεί στοιχειώδεις λειτουργίες: φόρτωση, μέτρηση, ολίσθηση κ.α. - Οι στοιχειώδεις λειτουργίες καλούνται μικρολειτουργίες (microoperations). Συνήθως εκτελούνται παράλληλα. • Η μονάδα ελέγχου παρέχει σήματα που καθορίζουν τη σειρά των μικρολειτουργιών • Το αποτέλεσμα μιας μικρολειτουργίας μπορεί να καθορίζει και τη ροή των σημάτων ελέγχου αλλά και των επόμενων μικρολειτουργιών ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΛΕΙΤΟΥΡΓΙΕΣ ΜΕΤΑΦΟΡΑΣ ΚΑΤΑΧΩΡΗΤΗ • Αναπαράσταση καταχωρητών R 7 6 5 4 3 2 1 0 15 0 15 8 7 0 R PC(H) PC(L) - Συμβολισμός μεταφοράς δεδομένων από R1 σε R2 R2 ←R1 - Συμβολισμός μεταφοράς υπό συνθήκη (if … then …) Η μεταφορά γίνεται εδώ if (k1=1) then (R2 ←R1) ήk1: R2 ←R1 t t+1 Load k1 R1 R2 clock ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΣΥΜΒΟΛΑ ΑΝΑΠΑΡΑΣΤΑΣΗΣ ΜΕΤΑΦΟΡΩΝ ΣΕ ΚΑΤΑΧΩΡΗΤΕΣ Σύμβολο Περιγραφή Παράδειγμα Γράμματα καταχωρητής AR, R, DR, IR Παρενθέσεις τμήμα καταχωρητή R2(1), R2(7:0), AR(L) Βέλος μεταφορά R2 ←R1 Κόμμα χωρίζει ταυτόχρονες R2 ←R1, R1 ←R2 μεταφορές Square brackets διεύθυνση μνήμης DR ←M[AR] ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΜΙΚΡΟΛΕΙΤΟΥΡΓΙΕΣ • Στοιχειώδεις λειτουργίες που επιδρούν στα περιεχόμενα των καταχωρητών και της μνήμης • Υπάρχουν 4 βασικοί τύποι μικρολειτουργιών 1. Μεταφοράς 2. Αριθμητικές 3. Λογικές 4. Ολίσθησης - Μια μικρολειτουργία μπορεί να ανήκει σε περισσότερους από έναν τύπους • Μικρολειτουργίες μεταφοράς - Μεταφορά δεδομένων από καταχωρητή σε καταχωρητή - Δεν υπάρχει αλλαγή στα δεδομένα κατά την μετακίνηση ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΜΙΚΡΟΛΕΙΤΟΥΡΓΙΕΣ (2) • Αριθμητικές μικρολειτουργίες - Υπάρχουν 5 βασικές αριθμητικές μικρολειτουργίες 1. Πρόσθεση : R0 ←R1 +R2 2. Αφαίρεση : R0 ←R1 + R2 + 1 3. Αύξηση : R1 ←R1 + 1 4. Μείωση : R1 ←R1 - 1 5. Συμπλήρωμα : R2 ←R2 • Ο πολλαπλασιασμός και η διαίρεση μπορούν να πραγματοποιηθούν από μια ακολουθία βασικών μικρολειτουργιών ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΜΙΚΡΟΛΕΙΤΟΥΡΓΙΕΣ (3) • Υπάρχει άμεση σχέση μεταξύ μιας RTL πρότασης (λειτουργίας) και των καταχωρητών • και των συναρτήσεων που απαιτούνται για την υλοποίησή της • X k1 : R1 ← R1 + R2 • X k2 : R1 ←R1 + R2 + 1 • Υλοποίηση R2 n n Cn-1 Cn XOR X Α/S k1 R1 Load V C ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΜΙΚΡΟΛΕΙΤΟΥΡΓΙΕΣ (4) • Λογικές μικρολειτουργίες • - Αντιμετωπίζουν κάθε ψηφίο ενός καταχωρητή ξεχωριστά και το χειρίζονται ως • δυαδική μεταβλητή • - Υπάρχουν 4 βασικές λογικές μικρολειτουργίες • 1. NOT : R1 ←R1 • 2. AND : R1 R2 • 3. OR : R1 R2 • 4. XOR : R1 R2 • - Υλοποιούνται εύκολα με μια ομάδα από πύλες, μια για κάθε ψηφίο • - Οι λογικές μικρολειτουργίες μπορούν να αλλάξουν τις τιμές των ψηφίων, να μηδενίσουν • ομάδες ψηφίων ή να θέσουν νέες τιμές στα ψηφία ενός καταχωρητή • - Η AND μπορεί να χρησιμοποιηθεί για επιλεκτικό μηδενισμό ψηφίων καταχωρητή: 1010110110101011 R1 (δεδομένα) 0000000011111111 R2 (μάσκα) 0000000010101011 R1 ←R1 R2 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΧΡΗΣΗ ΜΑΣΚΑΣ - Η AND μπορεί να χρησιμοποιηθεί για επιλεκτικό μηδενισμό ψηφίων καταχωρητή: 1010110110101011 R1 (δεδομένα) 0000000011111111 R2 (μάσκα) 0000000010101011 R1 ←R1 R2 - Η OR μπορεί να χρησιμοποιηθεί για να θέση ψηφία σε καταχωρητή: 1010110110101011 R1 (δεδομένα) 1111111100000000 R2 (μάσκα) 1111111110101011 R1 ←R1 R2 - Η ΧOR μπορεί να χρησιμοποιηθεί για επιλεκτικό συμπλήρωμα ψηφίων καταχωρητή: 1010110110101011 R1 (δεδομένα) 1111111100000000 R2 (μάσκα) 0101001010101011 R1 ←R1 R2 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΜΙΚΡΟΛΕΙΤΟΥΡΓΙΕΣ (5) • Μικρολειτουργίες ολίσθησης • Χρησιμοποιούνται για ολίσθηση των περιεχομένων των καταχωρητών προς τα: • 1. Δεξιά (προς το λιγότερο σημαντικό ψηφίο) • 2. Αριστερά (προς το μεγαλύτερης σημαντικότητας ψηφίο) • Χρησιμοποιούνται κατά τη σειριακή μεταφορά δεδομένων αλλά και σε • αριθμητικές και λογικές λειτουργίες • Συμβολισμός • Τύπος Συμβολισμός πηγή R2 Προορισμός R1 • Αριστερή ολίσθηση R1 slR2 10011110 00111100 • Δεξιά ολίσθηση R1 srR2 11100101 01110010 outgoing bits incoming bits ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΜΕΤΑΦΟΡΑ ΒΑΣΙΣΜΕΝΗ ΣΕ ΠΟΛΥΠΛΕΚΤΕΣ • Χρησιμοποιείται σε περιπτώσεις όπου καταχωρητές λαμβάνουν δεδομένα • από δυο ή περισσότερες πηγές σε διαφορετικούς χρόνους • if(k1=1) then (R0 ← R1) else if(k2=1) then (R0 ← R2) • ή k1:R0 ← R1, k1k2 : R0 ← R2 k2 k1 R2 4 Load 4 MUX R0 4 R1 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
s0 L0 n L0 0 1 2-to-1 MUX n R0 R0 s1 s0 n n s1 L1 L1 n 0 1 2-to-1 MUX 0 1 2 n 3-to-1 MUX R1 R1 n n s2 L2 L2 0 1 2-to-1 MUX n R2 R2 n n ΜΕΤΑΦΟΡΑ ΒΑΣΙΣΜΕΝΗ ΣΕ ΔΙΑΥΛΟ (BUS) • Ο δίαυλος αποτελεί ένα πολύ αποδοτικό μέσο μεταφοράς δεδομένων • Ένας δίαυλος χαρακτηρίζεται από μια ομάδα κοινών γραμμών που οδηγούνται από • σήματα ελέγχου που επιλέγουν την πηγή και τις κατευθύνσεις των δεδομένων • Σύγκριση αρχιτεκτονικής βασισμένης σε δίαυλο και αφιερωμένους πολυπλέκτες Μείωση ευελιξίας Κέρδος σε υλικό Register transfer s1 s0 L2 L1 L0 R0 ← R2 1 0 0 0 1 R0 ← R1, R2 ← R1 0 1 1 0 1 R0 ← R1, R1 ← R0 impossible ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
E2 E1 E0 L2 L1 L0 Load n R0 n Q D R n n R1 En n R2 ΤΡΙΣΤΑΘΕΣ ΔΙΑΥΛΟΣ • Οδηγεί σε ακόμα μεγαλύτερη μείωση του υλικού και αποτελεί τον πιο αποδοτικό τρόπο • υλοποίησης γρήγορων διαύλων με πολλές πηγές • Τα σήματα μεταφέρονται και προς τις δυο κατευθύνσεις - Έχει τις ίδιες λειτουργικές δυνατότητες με την περίπτωση του απλού διαύλου - Οδηγεί σε πιο ευέλικτη σχεδίαση ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΜΕΤΑΦΟΡΑ ΔΕΔΟΜΕΝΩΝ ΠΡΟΣ/ΑΠΌ ΤΗ ΜΝΗΜΗ • Read : DR ← M[AR] • Write : M[AR] ← DR • Μονάδα μνήμης συνδεδεμένη σε διαύλους διεύθυνσης και δεδομένων Timing and control 0 1 2 3 Data bus destination decoder load Address bus decoder 0 1 2 3 enable Data bus source decoder 0 1 2 enable D2 D1 D0 A0 A1 A2 n k read write Memory 2 x n k ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΧΕΙΡΙΣΤΕΣ ΔΕΔΟΜΕΝΩΝ (DATAPATHS) • Οι μικρολειτουργίες σε ένα υπολογιστικό σύστημα εκτελούνται από την Αριθμητική/Λογική μονάδα (ALU) σε ένα κύκλο ρολογιού • Ο συνδυασμός της ALU με μια ομάδα καταχωρητών και τις κατάλληλες διασυνδέσεις αποτελούν μια ολοκληρωμένη μονάδα χειρισμού δεδομένων • Ένας ή περισσότεροι δίαυλοι χρησιμοποιούνται για την διασύνδεση πολλών καταχωρητών σε ένα χειριστή δεδομένων • Figure 7.9 • Η δρομολόγηση των λειτουργιών σε ένα χειριστή δεδομένων καθορίζεται από τη μονάδα ελέγχου πχ. Εκτέλεση R1 ← R2+R3 • Η μονάδα ελέγχου παρέχει τις παρακάτω εισόδους ελέγχου 1. A select: ο R2 στον δίαυλο Α 2. B select, MB select: o R3 στον δίαυλο Β 3. Gselect: άθροιση Α+Β 4. MF select, MD select: τοποθέτηση αθροίσματος στον δίαυλο D 5. Destination select, Load enable: φόρτωση αποτελέσματος στον R1 - Όλη η παραπάνω μικρολειτουργία διαρκεί ένα κύκλο ρολογιού ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΧΕΙΡΙΣΤΕΣ ΔΕΔΟΜΕΝΩΝ (DATAPATHS) ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
Data input A A0 A1 An B0 B1 Bn Cin s0 s1 s2 G0 G1 Gn Cout Data output G N-bit ALU Data input B Carry input Operation select Mode select Carry output ΑΡΙΘΜΗΤΙΚΗ/ΛΟΓΙΚΗ ΜΟΝΑΔΑ (ALU) • Η ALU είναι ένα συνδυαστικό κύκλωμα που εκτελεί μια ομάδα βασικών αριθμητικών και λογικών μικρολειτουργιών • Υπάρχει ένας αριθμός γραμμών επιλογής (k) που καθορίζουν την λειτουργία που θα εκτελεσθεί (2κ) ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
Cin Α X n n-bit parallel adder G=x+y+Cin Β B input logic s0 Y n s1 Cout ΑΡΙΘΜΗΤΙΚΟ ΜΕΡΟΣ ΤΗΣ ALU • Το βασικό κύκλωμα του αριθμητικού μέρους της ALU είναι ο παράλληλος αθροιστής • Οι διάφορες αριθμητικές λειτουργίες καθορίζονται από τα s0, s1 select input G=A+Y+Cin s1 s0 Y Cin=0 Cin=1 0 0 all 0’s G=A (transfer) G=A+1 (increment) 0 1 B G=A+B (add) G=A+B+1 1 0 B΄ G=A+B΄ G=A+B΄+1 (subtrack) 1 1 all 1’s G=A-1 (decrement) G=A (transfer) ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
Cin C0 s0 s1 A0 X0 FA Y0 G0 0 MUX 1 C1 B0 X0 FA Y0 A1 G1 0 MUX 1 C2 B1 X0 FA Y0 A2 G2 0 MUX 1 C3 B2 X0 FA Y0 A3 G3 0 MUX 1 Cout B3 C4 ΑΡΙΘΜΗΤΙΚΟ ΜΕΡΟΣ ΤΗΣ ALU (2) • Το B logic κύκλωμα μπορεί να υλοποιηθεί με n 4-σε-1 πολυπλέκτες που έχουν ως είσοδο 0, Bi, Bi΄και 1. • Ισχύει Yi=Bi·s0 + B΄·s1και ο αθροιστής μπορεί να υλοποιηθεί με 2-σε-1 πολυπλέκτες ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
s0 s0 s1 s1 Ai 4-to-1 MUX Bi 0 1 2 3 G ΛΟΓΙΚΟ ΜΕΡΟΣ ΤΗΣ ALU • Οι λογικές μικρολειτουργίες χειρίζονται κάθε ψηφίο ενός καταχωρητή ως δυαδική μεταβλητή • Συνήθως ορίζουμε τέσσερις λογικές μικρολειτουργίες AND, OR, XOR, NOT. Οι υπόλοιπες προκύπτουν από αυτές • Διάγραμμα λογικού κυκλώματος ενός ψηφίου s1 s0 output operation 0 0 0 1 1 0 1 1 G=A∩B G=AB G=AB G=A΄ AND OR XOR NOT ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
Ci One stage of arithmetic unit Ci+1 Ai Bi 0 1 2-to-1 MUX Gi S One stage of logic unit s0 s1 s2 ΑΡΙΘΜΗΤΙΚΗ/ΛΟΓΙΚΗ ΜΟΝΑΔΑ • Λογικό διάγραμμα ενός ψηφίου της ALU s2 s1 s0 Cin Operation Function 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0 0 X 1 0 1 X 1 1 0 X 1 1 1 X G=A G=A+1 G=A+B G=A+B+1 G=A+B΄ G=A+B΄+1 G=A-1 G=A G=AB G=AB G=AB G=A΄ Transfer A Increment A Addition Add with Cin Add plus 1’s complement of B Substraction Decrement A Transfer A AND OR XOR NOT Πίνακας συναρτήσεων της ALU ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
A3 A2 A1 A0 Serial output L Serial output R IR IL 0 1 0 1 0 1 0 1 MUX MUX MUX MUX S S S S S H0 H1 H3 H2 ΟΛΙΣΘΗΤΗΣ • Ο ολισθητής προκαλεί δεξιά ή αριστερή μετατόπιση μιας δυαδικής λέξης • Ένας συνδυαστικός ολισθητής μπορεί να κατασκευαστεί με πολυπλέκτες S=0 : Δεξιά ολίσθηση κατά ένα ψηφίο S=1 : Αριστερή ολίσθηση κατά ένα ψηφίο ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
D3 D2 D1 D0 s0 s1 3 2 1 0 s1 s0 3 2 1 0 s1 s0 3 2 1 0 s1 s0 3 2 1 0 s1 s0 Y3 Y2 Y1 Y0 ΟΛΙΣΘΗΤΗΣ ΒΑΡΕΛΙΟΥ (BARREL SHIFTER) • Είναι ένα συνδυαστικό κύκλωμα που ολισθαίνει μια δυαδική λέξη κατά τον αριθμό ψηφίων που καθορίζουν τα σήματα ελέγχου • Τα ψηφία που εξέρχονται του πεδίου της λέξης επαναφέρονται MUX MUX MUX MUX • Ένας barrel shifter με 2nεισόδους απαιτεί 2n πολυπλέκτες των 2n εισόδων και • των n εισόδων επιλογής • Σε έναν barrel shifter 2n ψηφίων, αριστερή ολίσθηση i ψηφίων ισοδυναμεί με • δεξιά ολίσθηση 2n-i ψηφίων • -Συνεπώς, με έναν ολισθητή αριστερής ολίσθησης μπορούμε να δημιουργήσουμε • οποιαδήποτε δεξιά ολίσθηση ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
n write D data D address 2m x n REGISTER FILE m m m A addr. B addr. A data B data n n constant in 1 0 MUX B MB select n Bus A n Bus B 5 FS FUNCTION UNIT V C N Z n 0 1 MUX D Data in MD select ΑΝΑΠΑΡΑΣΤΑΣΗ ΧΕΙΡΙΣΤΩΝ ΔΕΔΟΜΕΝΩΝ • Χρησιμοποιούμε ιεραρχικές δομές στην περιγραφή κυκλωμάτων για μείωση της πολυπλοκότητας στο σχεδιασμό • Δομή χειριστή δεδομένων • Αρχείο καταχωρητών (register file) καλείται • μια ομάδα καταχωρητών τα περιεχόμενα των • οποίων υπόκεινται στις ίδιες μικρολειτουργίες • - Αντιστοιχεί σε μικρή και πολύ γρήγορη μνήμη ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
Ο ΚΟΣΜΟΣ ΤΟΥ ΕΛΕΓΧΟΥ • Datapath με εισόδους ελέγχου ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
Ο ΚΟΣΜΟΣ ΤΟΥ ΕΛΕΓΧΟΥ • Κάθε λέξη ελέγχου αντιστοιχεί σε μια μικρολειτουργία DA, AA, BA MB FS MD RW Function Code Function Code Function Code Function Code Function Code R0 000 register 0 F=A 00000 function 0 no write 0 R1 001 constant 0 F=A+1 00001 data in 1 write 1 R2 010 F=A+B 00010 R3 011 F=A+B+1 00011 R4 100 F=A+B΄ 00100 R5 101 F=A+B΄+1 00101 R6 110 F=A-1 00110 R7 111 F=A 00111 F=AB 01000 F=AB 01010 F=AB 01100 F=A΄ 01110 F=srA 10000 F=slA 10001 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
Ο ΚΟΣΜΟΣ ΤΟΥ ΕΛΕΓΧΟΥ (2) • Πχ. Για τη μικρολειτουργίαR1 ←R1+R3+1 προκύπτει η λέξη: πεδίο: DA AA BA MB FS MD RW Σύμβολο:R1 R2 R3 register F=A+B΄+1 function write Δυαδικός: 001 010 011 0 00101 0 1 • Άλλα παραδείγματα μικρολειτουργιών ΜικρολειτουργίαDA AA BA MB FS MD RW R4 ← slR6R4 R6 - register F=slA function write 100 110 000 0 10001 0 1 R7 ←R7 + 1 R7 R7 - register F=A+1 function write 111 111 000 0 00001 0 1 R1 ←R0 + 2R1 R0 - constant F=A+B function write 001 000 000 1 00010 0 1 Data out ←R3- - R3 register - - no write 100 110 011 0 00000 0 0 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
Ο ΚΟΣΜΟΣ ΤΟΥ ΕΛΕΓΧΟΥ (3) • Αποτελέσματα εξομοίωσης ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
3 WR OF clock 3ns REGISTER FILE 3ns 3ns 1 REGISTER FILE MUX B 1ns 3ns OF EX MUX B 1ns 1ns FUNCTION UNIT 2 FUNCTION UNIT 4ns 4ns EX WB 1ns 1ns 3 MUX D 1ns MUX D ΧΕΙΡΙΣΤΗΣ ΔΕΔΟΜΕΝΩΝ ΜΕ ΔΙΟΧΕΤΕΥΣΗ • Με την τεχνική της διοχέτευσης μπορεί να επιτευχθεί αύξηση του ρυθμού επεξεργασίας (throughput) clock Ταχύτητα επεξεργασίας 83.3 MHz 200 MHz - Απαιτείται η εισαγωγή καταχωρητών που χωρίζουν το κύκλωμα σε επίπεδα - κάθε επίπεδο λειτουργεί ανεξάρτητα και εκτελεί συγκεκριμένο τμήμα μιας μικρολειτουργίας ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΧΕΙΡΙΣΤΗΣ ΔΕΔΟΜΕΝΩΝ ΜΕ ΔΙΟΧΕΤΕΥΣΗ ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΔΙΟΧΕΤΕΥΣΗ ΜΙΚΡΟΛΕΙΤΟΥΡΓΙΩΝ • Κάθε μικρολειτουργία χωρίζεται σε επίπεδα αντίστοιχα του χειριστή δεδομένων • Διάγραμμα διοχέτευσης μικρολειτουργιών Clock cycle 1 2 3 4 5 6 7 8 9 R1←R2 - R3 1 R4← slR6 2 R7←R7 + 1 3 R1←R0 + 2 4 Data out←R3 5 R4←Data in 6 R5←0 7 OF EX WB OF EX WB OF EX WB OF EX WB OF EX WB OF EX WB OF EX WB - Απαιτούνται : 9*5 = 45ns Για συμβατική υλοποίηση: 7*15=105ns Αύξηση ταχύτητας κατά 2.3 - Σε περίπτωση πλήρους αξιοποίησης της τεχνικής της διοχέτευσης Με διοχέτευση: (5*3)/3=5 μικρολειτουργίες σε 25ns Συμβατικός: (5*5=25)/15=1.67 μικρολειτουργίες Αύξηση ταχύτητας : 5/1.67 = 3 ΨΗΦΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
