Download
1 / 20
200 likes | 283 Views
Application of Optimal Control on Financial Modeling. Some Financial Models Introduce an oscillator problem The computational algorithms for the oscillator problem An investment model and the computational results of this model. The asset pricing model of Lucas(1978)

E N D
Application of Optimal Control on Financial Modeling • Some Financial Models • Introduce an oscillator problem • The computational algorithms for the oscillator problem • An investment model and the computational results of this model
The asset pricing model of Lucas(1978) The model of Gourieroux and Janiak(2001) Merton’s model Some Financial Models
The asset pricing model of Lucas(1978) • In this model, the present value of utilities u(ct) is maximized. • Single asset pays dividends according to stochastic model yt+1 = ryt + et+1
The model of Gourieroux and Janiak(2001) • In this model, the present value of utility function of consumption is maximized, subject to a “ budget constraint” qtCt+atpt = Rt+at+1pt
Merton’s model • The objective to be optimized is an integral of utility of consumption over the planning period, plus a function of wealth at the end time.
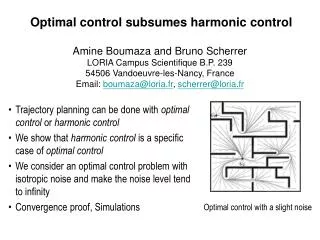
Consider a dynamic system described by a second - order differential equation:x1(t) + ßx1(t) + T2x1(t) = T2u(t)the objective is:MIN J =0T |x1(t) - (t)|dt
The computational algorithms • Piecewise-linear transformation • Non-linear time scale transformation • Oscillator transformation • The computational algorithms
Piecewise-linear transformation:.The time interval [0,1] is divided as follows:0 = t0 < t1 < … < tj < tj+1 < … < tr = 1.A scale time takes values: = 0,h,2h,…, jh,(j+1)h,…,rh = 1.The relationship between and t:t = () = h-1(tj+1-tj)(-h(j-1))+tj
Non-linear time scale transformation • Goh and Teo introduced a change of time scale for a time-optimal control problem while the terminal time T is a variable. Let t = T where is the new time variable mapping in [0,1], t is again written for , then problem becomes a fixed-time optimal control problem with interval [0,1] and parameter T. This allows T to be computed accurately without being interpolated between subdivision points.
First, the time horizon [0,1] is divided into nb “big subintervals”, with end-points: 0=pt0 < pt1 <…< ptj < pt j+1 < … < ptnb=1 Then each subinterval [ptj, ptj+1] subdivided into ns “small subintervals” A scale time is constructed for the computer package, corresponding to the total number of subintervals nn=nb*ns, Oscillator transformation
Computational algorithms • Main program for the oscillator problem • Minimizing Program • Input function for second order differential equation • Input function for the oscillator problem
FDM (financial decision-making) model • Problem description • Analytical Solution • Computational algorithms for the non-linear optimal control problem • computing results and conclusion
Problem description • The objective of this model is to maximize the present value of the owners’ shares • Max P(T)eT + T0e-t[1-ur(t)]rE(t)dt subject to: P(t) = c[{1-ur(t)}rE(t)- P(t)] E(t) = rE(t)[ur(t)+us(t){1-E/(1-)P(t)}] u(t) U = u|ur+us k/r <1, ur0, us 0
Analytical solution • The solution shows the classical bang-bang control. • In the case (a) : • A: ur* = 0, us* = 0 • B: ur* = k/r, us* = 0 • C: ur* = 0, us* = k/r
Computational algorithms • Main model program • The minimization of the calling program • The state function calculation • The integral calculation • End point condition