Download
1 / 16
160 likes | 241 Views
THEOREM 2 Vector-Valued Derivatives Are Computed Componentwise A vector-valued function r(t ) = x (t ) , y (t ) is differentiable iff each component is differentiable. In this case ,. Calculate r”( 3) , where r(t ) = ln t, t . THEOREM 3 Product Rule for Dot Product

E N D
THEOREM 2 Vector-Valued Derivatives Are Computed ComponentwiseA vector-valued function r(t) = x (t), y (t)is differentiable iffeach component is differentiable. In this case, Calculate r”(3), where r(t) = ln t, t .
THEOREM 3 Product Rule for Dot Product Assume that r1(t) and r2(t) are differentiable. Then
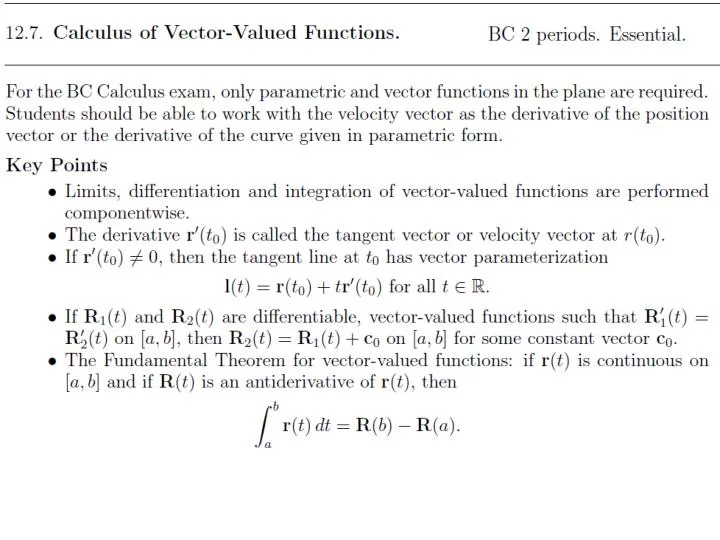
The Derivative as a Tangent Vector The derivative vector r’(t0)has an important geometric property: It points in the direction tangent to the path traced by r(t) at t = t0. To understand why, consider the difference quotient, where Δr = r (t0 + h) − r (t0) and Δt = h with h 0:
The Derivative as a Tangent Vector The vector Δr points from the head of r(t0) to the head of r(t0+ h). The difference quotient Δr/Δt is a scalar multiple of Δr and therefore points in the same direction.
The Derivative as a Tangent Vector As h = Δttends to zero, Δralso tends to zero but the quotient Δr/Δt approaches a vector r’(t0), which, if nonzero, points in the direction tangent to the curve. The figure illustrates the limiting process. We refer to r’(t0)as the tangent or velocity vector at r(t0). The tangent vector r’(t0) (if it is nonzero) is a direction vector for the tangent line to the curve. Therefore, the tangent line has vector parametrization: Although it has been our convention to regard all vectors as based at the origin, the tangent vector r(t) is an exception; we visualize it as a vector based at the terminal point of r (t). This makes sense because r(t) then appears as a vector tangent to the curve.
The Derivative as a Tangent Vector Plotting Tangent Vectors Plot r(t) = cost, sin t together with its tangent vectors at and . Find a parametrization of the tangent line at . and thus the tangent line is parametrized by
The Derivative as a Tangent Vector There are some important differences between vector- and scalar-valued derivatives. The tangent line to a plane curve y = f (x) is horizontal at x0 if f’(x0) = 0. But in a vector parametrization, the tangent vector is horizontal and nonzero if y’(t0) = 0 but x’(t0) 0.
The Derivative as a Tangent Vector Horizontal Tangent Vectors on the Cycloid The function traces a cycloid. Find the points where: (a) r’(t) is horizontal and nonzero. (b) r ’(t) is the zero vector. The tangent vector is By periodicity, we conclude that r’(t) is nonzero and horizontal for t = π, 3π, 5π,…and r’(t) = 0 for t = 0, 2π, 4π,…
The Derivative as a Tangent Vector CONCEPTUAL INSIGHT The cycloid below has sharp points called cusps at points where x = 0, 2π, 4π,…. If we represent the cycloid as the graph of a function y = f (x), then f’(x) does not exist at these points. By contrast, the vector derivative r’(t) = 1 − cos t, sin t exists for all t, but r’(t) = 0 at the cusps. In general, r’(t)is a direction vector for the tangent line whenever it exists, but we get no information about the tangent line (which may or may not exist) at points where r’(t)= 0.
The Derivative as a Tangent Vector GRAPHICAL INSIGHT A vector parametrizationr(t)consisting of vectors of constant length R traces a curve on the circle of radius R with center at the origin. Thus r’(t)is tangent to this circle. But any line that is tangent to a circle at a point P is orthogonal to the radial vector through P, and thus r(t)is orthogonal to r’(t).
Vector-Valued Integration The integral of a vector-valued function can be defined via componentwiseintegration. The integral exists if each of the components x (t), y (t) is integrable. For example,
Vector-Valued Integration An antiderivative of r(t)is a vector-valued function R(t) such that R’(t)= r(t). In the single-variable case, two functions f1(x) and f2(x) with the same derivative differ by a constant. Similarly, two vector-valued functions with the same derivative differ by a constant vector (i.e., a vector that does not depend on t). THEOREM 4 If R1(t) and R2(t)are differentiable and for some constant vector c.
Vector-Valued Integration The general antiderivative of r(t) is written Fundamental Theorem of Calculus for Vector-Valued Functions If r(t) is continuous on [a,b], and R(t) is an antiderivative of r(t), then
Vector-Valued Integration Finding Position via Vector-Valued Differential Equations The path of a particle satisfies Find the particle’s location at The general solution is obtained by integration: gives us The initial condition