Download
1 / 17
180 likes | 415 Views
静电陀螺概述. 框架陀螺 :精度追求、三浮 结构复杂,成本高昂 静电陀螺 (Electrostatic Gyro) :较彻底的支承革新. 球形转子 ; 电极球腔 静电悬浮 ; 超高真空 静电陀螺优点 : 精度高,真正的自由转子 结构简单,可靠性高 应用 :战略武器、火箭 缺点 :工艺 复杂. 发展概况. 发展阶段. 1952 年提出 1970s 初期 0.01 ( 0 /h ) 1970s 中期 0.0001 ( 0 /h ) 1970s 末期进入实用 1995 年 0.00001 ( 0 /h )

E N D
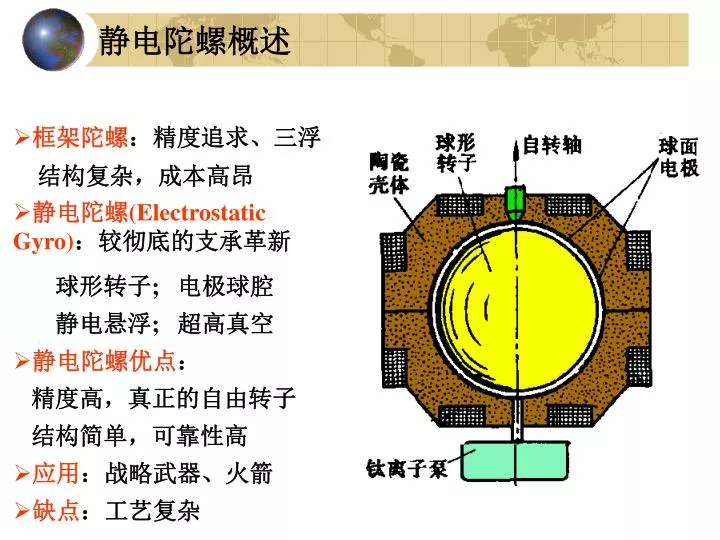
静电陀螺概述 • 框架陀螺:精度追求、三浮 • 结构复杂,成本高昂 • 静电陀螺(Electrostatic Gyro):较彻底的支承革新 • 球形转子; 电极球腔 • 静电悬浮; 超高真空 • 静电陀螺优点: • 精度高,真正的自由转子 • 结构简单,可靠性高 • 应用:战略武器、火箭 • 缺点:工艺复杂
发展概况 发展阶段 • 1952年提出 • 1970s初期0.01(0/h) • 1970s中期0.0001(0/h) • 1970s末期进入实用 • 1995年0.00001(0/h) • 04年斯坦福大学10-11(0/h) • 主要研制机构: • 1950s后期,美国Honeywell和Autonetics开始研制 • 从 1960s 末到 1980s,法国、英国、前苏联、中国也相继展开静电陀螺的研制
结构组成:总述 • 球形转子 • 陶瓷球腔 • 凹形球面电极 高电压/小间隙/强电场/悬浮/控制回路稳定 • 驱动线圈:转子起旋 • 定中线圈:转子轴对准 • 钛离子泵:抽真空 • 光电传感 :读取角度
结构组成:球形转子 • 两种类型:空心球和实心球 • 材料:铍(密度小、刚度大) 制造工艺: • 空心球:两个薄壁半球配合而成 外径:38~50mm 壁厚:0.4~0.5mm 赤道处加厚 • 实心球:钽丝嵌入铍棒 • 让质心偏离球心 • 两种类型比较: • 直径、静电支承力 • 变形、转速
结构组成:壳体、电极、驱动与定中 • 壳体:两块陶瓷碗密封连接 • 电极:碗内壁制成球面电极 • 内壁研磨,电镀,切割 • 切割方案:正六、正八面体
支承原理:从平板到球面电极 • 平板电极 板间电场强度 板间电容 电场能量 将 W 对 d 求导,得到静电引力公式 • 球面电极 每块微小面积可看作和平板情形相同 所以合力
支承原理:两种球面电极引力公式 • 对于正六面体电极的每块 静电引力的方向,如图 • 对于正八面体电极的每块 静电引力的方向,如图
支承原理:稳定性的保证 • 以正六面体为例,设转子沿 AB 轴朝 A 偏离Δx • 两边引力的变化会进一步把转子吸到 A 的一边 • 必须改变两边静电引力变化,才能抑制转子的位移。 • 基本思路:测量位移Δx,改变两端电压 UA,UB
支承原理:位移导致电极电容改变 • 转子位移 Δx:通过测量电极和转子之间电容改变量 电容 • 转子位于中心时,两个电极和转子间的电容均为 • 转子向 A 电极移动Δx,两个电极和转子的间距分别变为 • dA = d0 -Δx • dB = d0 +Δx 类似地 • 电容改变量 ΔC 和位移 Δx 成正比,用敏感电桥可以测出
支承原理:位置反馈回路 △U = kC·△C = k·△x UA = U0- k·△x UB = U0 + k·△x 转子受到的合力 支承弹簧,K支承刚度
支承原理:承载能力 • 静电陀螺承载能力(Suspension Capability):根据 • UA = U0 - △U • UB = U0+ △U • 当△U=U0 时,UA= 0,FA= 0,UB = 2U0,最大支承力: 所以又可写成 Fm = 4F0 静电陀螺的承载能力
角度读取概述 • 角度读取 • 壳体相对转子极轴的转角 • 读取范围分类 • 小角度、大角度 • 读取方式分类 • 光电法、质量不平衡调制法(Imbalanced Mass Modulation)
光电读取法:刻线区和光电传感器 • 光电读取法:借助光电传感器扫描转子上的刻线 • 刻线区: 极轴处和倾斜处 • 光电传感器:(两个) • 测量原理: • 起始零位:极轴传感器输出恒值信号,倾斜传感器输出脉冲
光电读取法:光轴偏离产生周期信号 当壳体转动,使极轴传感器的光轴向对转子极轴偏离一小角度(比如向右),则在转子绕极周旋转一周的过程中,极轴光电传感器输出周期信号。
质量不平衡调制法:原理 测量范围:大角度 适用类型:实心转子 • 质心偏于赤道平面 • 旋转轴通过质心 • 球心绕质心旋转:偏摆 • 转子与各电极的间隙发生周期性变化
质量不平衡调制法:原理 • 在赤道平面内间隙变化最大,沿极轴方向变化最小 • 间隙调制=> 电容调制=> 电极输出信号被调制 • 电极旋转角度影响到其输出中的调制信号的强弱 • 旋转角度大小和方向的判断 静电陀螺仪的三个基本问题: 一、支承 二、读取 三、精度(误差控制) • 正八面体电极支承及其变换
静电陀螺误差源分析 转子质心 轴向位移 加速度 干扰力矩 球静平衡误差 球加工误差 转子非球形 球离心变形 间 隙 变 化 球温度变形 场 强 变 化 重力加速度 转子中心线 位移 载体加速度 振动或冲击 静电场 干扰力矩 电 容 变 化 电 压 变 化 碗中心错位 碗装配误差 电极球面误差 电极表面 非球形 碗温度变形 电极开槽误差 电极面积 不相等 碗开孔影响 杂散磁场 干扰力矩 杂散磁场
