Download
1 / 28
330 likes | 827 Views
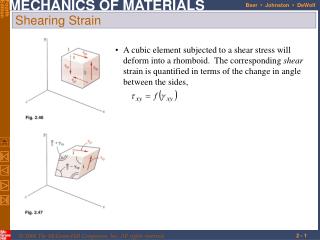
Strain II. Mohr Circle for Strain. For stress Mohr circle , we plot the normal stress n against the shear stress s , and we use equations which represent a circle We will learn about stress Mohr circle later

E N D
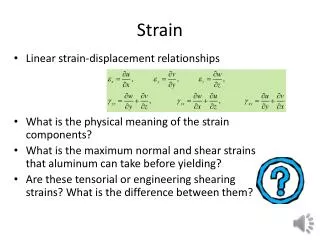
Mohr Circle for Strain • For stress Mohr circle, we plot the normal stress n against the shear stress s, and we use equations which represent a circle • We will learn about stress Mohr circle later • Because geologists deal with deformed rocks, when using the Mohr circle for strain, we would like to deal with measures that represent the deformed state (not the undeformed state!)
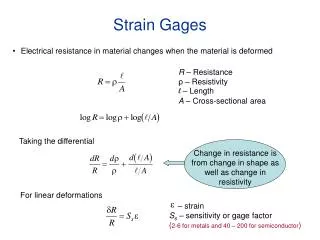
Reciprocal strain ellipse Undeformed + Strain ellipse Deformed 1 1 + 1 '1 '1 + Deformed + reciprocal strain ellipse Undeformed
Equations for Mohr circle for strain • We already know the quadratic elongation: =s2 = (1+e)2 • Let’s introduce two new parameters: ´ = 1/(reciprocal quadratic elongation) ´represents the abscissa for the Mohr circle coordinates ´ = / = ´ ´represents the ordinate of the Mohr circle coordinates
Equations for the Mohr circle • The two equations for the Mohr circle are in terms of ´and ´ (not and ) because we want to deal with the deformed state ´ = (´1+´3)/2–(´3-´1)/2 cos2´ ´ = (´3-´1)/2 sin2´
Mohr Circle for Strain … • Parametric equations of the Mohr circle: ´ = (´1+´3)/2–(´3-´1)/2cos2´ Center, c =(´1+´3)/2(mean strain) Radius, r =(´3-´1)/2 (1/2 differential stress) ´ = c–rcos2´ NOTE: If ´=0; 2´=0, then cos2´=1 and ´ = (´1+´3)/2–(´3-´1)/2= ´1+´3 -´3+´1/ 2 ´= ´1 If ´=90; 2´=180, cos2´= -1 and ´ = (´1+´3)/2–(´3-´1)/2 *(-1) = ´1+´3+´3-´1/ 2 ´= ´3 ´ = (´3-´1)/2 sin2´ ´ = r sin2´ NOTE: ´=0 for 2´=0 & 180
CW + Real world r Mohr world CW + O c
Mohr Circle for Strain • The coordinates of any point on the circle satisfy the above two equations • The Mohr circle always plots to the right of the origin because we plot the reciprocal quadratic elongation ’, which is always + for both + extension and – extension (i.e., shortening): =(1+e)2 and ´=1/
Sign Conventions • The 2angle is from the c´1 line to the point on the circle, where c is the center of the Mohr circle NOTE: Points on the circle represent lines in the real world! • Since we use the reciprocal quadratic elongations´1 & ´3 • Clockwise (cw) 2 from c´1 is ‘+’, and • Counterclockwise (ccw) 2 is ‘-’ (this is opposite to theconvention with stress!) • cw in real world is cw2 in the Mohr circle, and vice versa! • However, ccw, from the O1´line to any point on the circle, is ‘+’, and cw is ‘-’, where O is the origin
CW + Real world r Mohr world CW + + O c
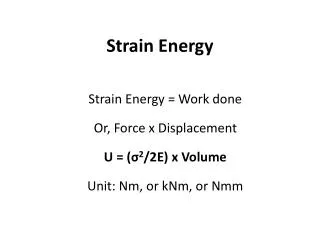
Simple example: A unit sphere is shortened by 50% and extended by 100% e1 = 1, and e3 = -0.5 S1 = X = l´/lo = 1+e1= 2 & S3= Z = l´/lo=1+e3 = 0.5 1 = (1+e1)2 = S12 = 4 &3 = (1+e3)2 =S32 = 0.25 1´= 1/1= 0.25 & 3´= 1/3 = 4 Note the area remains constant: XZ = 1 3= 4 0.25 = 1 c = (´1+ ´3)/2 = (0.25+4)/2 = 2.125 r = (´3 - ´1)/2 = (4-0.25)/2 = 1.90 • Having ´c´ and ´r´, we can plot the circle!
C = 2.125 r = 1.90 ’ 1 ’1 ’3 ’ c 4 1 2 3 -1
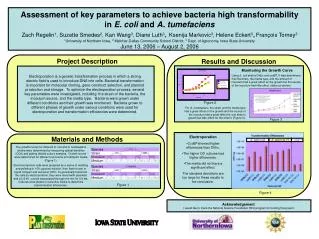
Example: deformed brachiopod Undeformed Mo = 5.4 Deformed m’ ~ 45o ho = 12.4 m’= 9 1 m’ 1 m’ cw ccw h’ h’ ccw h’= 12.4 m’ Strain ellipse
Relative Length in mm (measured on pc screen at 100% magnification view!) Median line (m): (’, ’) = (0.36, 0.36) Hinge line (h): (’, ’) = (1, -1) = lnfe
m’ 1 Median line (m): (’, ’) = (0.36, 0.36) m’ m’ Hinge line (h): (’, ’) = (1, -1) cw ccw ’ = 1 h’ ’ h’ ccw 1 m bisector +2m’ ’3 ’1 +m’ ’ -h’ c 1 2 3 -2h’ Mohr World ’h’ is ccw -35o’m’ is cw +13o h’ is cw -45o m’ is ccw +45o -1 h = lnfe
Example: Simple shear of a brachiopod 1 Undeformed mo ccwh’ ’h’ cw h’ ho ’m’ ccw cw m’ 1 m’ ’h’ is cw +45o ’m’ is ccw -20o h’ is ccw +32o m’ is cw -30o
Relative Length in mm (measured on pc screen at 100% magnification view!) ’h’ is cw ~27o ’m’ is ccw ~35o h’ is ccw 32o m’ is cw 30o Median line (m): (’, ’) = (1.1, -0.633) Hinge line (h): (’, ’) = (0.8, 0.50)
1 Physical World ’h’ is cw ~27o ’m’ is ccw ~35o h’ is ccw 32o m’ is cw 30o ccwh’ ’h’ cw h’ ’= 1 ’m’ ccw cw m’ ’ (0.8, 0.50) m’ h 0.5 2’h’ bisector ’ ’3 ’1 h’ m’ c 0.5 1.5 2 2’m’ Mohr World -0.5 m (1.1, -0.633)
Lines of no finite elongation - lnfe • Elongation along the lnfe is zero • They don’t change length during deformation, i.e., elnfe=0, and lnfe=1, and therefore ´lnfe=1 • Draw the vertical line of ´ =1 the ´axis! • The intersection of this line with the Mohr circle defines the lnfe (there are two of them!). • Numerical Solution: tan2´ = (1-´1)/(´2-1)
Lnfe 1 m ’ 'm’ Real world h Lnfe ‘h’ 2 (’, ’) m 1 + 2'm’ ’3 ’1 ’ c - 2 1 2'h’ Mohr world h (’, ’) Lnfe
Finding the angular shear • Because ´=/ and ´=1/ then: ´= ´which yields = ´/´ • Since shear strain: = tan , and = ´/´: tan =´/´ i.e., is the angle of slope of a straight line through the origin • The Mohr circle does not directly provide the shear strain or the angular shear , it only provides ´ But, since = ´/´, then ´= if ´=1
Angular Shear = ´/´ • The above equation means that we can get the angular shear () for any line (i.e., any point on the circle) from the ´/´ of the coordinates of that point • Thus, is the angle between the ´ axis and a line connecting the origin (O) to any point (´, ´) on the circle • ccw and cw in the Mohr circle translate into ccw and cw in the physical world (i.e., same sense), respectively!
Lines of Maximum Shear (lms) ’1 lms ’ Real world ‘lms lms lnfe ‘lms lms 1 + 2‘lms ’3 ’1 c - ’ 1 2 2‘lms lms Mohr world lnfe
Finding lines of maximum shear (lms) strain (max) • Draw two tangents (±) to the Mohr circle from the origin, and measure the 2´(±) where the two lines intersect the circle. • These are the lms • Numerical Solution: Orientation: tan ´lms= (2/1) (Note: these are,not´) Amount:max = (1-2 )/2 12
Lines of Maximum Shear (lms) ’1 lms ’ Real world ‘lms lms lnfe ‘lms lms 1 + 2‘lms ’3 ’1 c - ’ 1 2 2‘lms lms Mohr world lnfe
Two brachiopod problem on page 318 Ragan Note: our sign convention is different! rosette ’ arm b =30 OL arm a arm b 30 arm a 1 arm b k’1 k’3 + 27 c ’ -35 arm a Arbitrarily locate OL along arm b. Put origin of rosette at OL. Line up both arm ‘b’s. Find ‘pa’ where arm ‘a’ of rosette intersects other arm ‘a’. Draw circle
Two trilobites problem on page 316-317 Ragan rosette ’ S1 m=20 arm m OL m arm m k’3 + 36 2m=40 k’1 c ’ Arbitrarily locate OL along arm m. Put origin of rosette at OL. Line up both arm ‘m’s. Find k’1 where arm m of rosette intersects the x axis. Draw circle