Download
1 / 4
50 likes | 230 Views
Detector Alignment Thomas Naumann DESY Zeuthen. Detector alignment and calibration often imply least squares fits with many parameters : n global parameters of calibration, n = 10 ... 10.000 m local parameters of the data model of an object (e.g. tracks) where m = k x l with

E N D
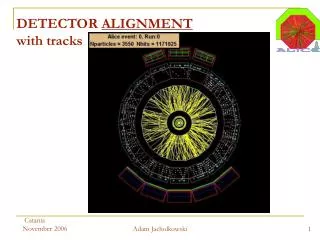
Detector AlignmentThomas NaumannDESY Zeuthen Detector alignment and calibration often imply least squares fits with many parameters : n global parameters of calibration, n = 10 ... 10.000 m local parameters of the data model of an object (e.g. tracks) where m = k x l with k ... nr of objects , large , >> 1000 l ... nr of parameters , small , < 10 Traditional methodto correct by residuals of local fit is biased since correlation between local and global parameters is ignored (wrong global constants used) Solution: Fit local and globalparameters simultaneously large nr of para’s: N = n + k x l time to solve linear problem by matrix inversion ~ N³ N = 1.000: ~ 1 min @ 1 GHz with double prec. N > 10.000: > 1 day intractable Idea : only global parameters needed for calibration and alignment use special matrix structure to get computing time ~ n3
Millepede Author: V.Blobel, Hamburg University 1) The matrix equation for the simultaneous fit of global and local parameters contains: • the normal equations of least squares of thelocal fits i=1,...,l Giai = bi with thelocal parameter vectors ai and the covariance matrices Gi . Traditionally neglect correlations Giwith global parameters and solve locally for ai inverting l matrices Gi of rank k. • the sum over the covariance matrices Ci of the correlations between the vector aof them global calibration parameters. • thematrices Gi of thecorrelations between localandglobal parameters. Inversion by partition: Use the special shape of this matrix and rewrite the matrix equation as C’ a = b’ with new matrices C’andb’ which sum over the local parameters and explicitly contain only the global parameters : Solve the linear least square problem independent of nr of local parameters ! 1)for code and manual see http://www.desy.de/~blobel/millepede.f and .ps
The H1 Backward Silicon Detector at HERA : e e measure scattered electron’s polar angle qand energy + momentum E and p BST uses r and jSi detectors with 640 strips of 96 and 75 mm pitch : has 8 z planes along the beam axis with 16 j sectors each. Q needs alignment of the r detectors p needs alignment of the j detectors. get z correlations between BST parts 1 and 2 and j correlations between sectors
The Alignment of the H1 BST For the r detectors a resolution of 18 mm is reached. This gives a polar angle precision of 0.4 mrad. Alignment of the j detectors : get electron charge and momentum up to the HERA beam energy of Ee = 27.5 GeV from BST alone ! E / p The ratio of the energy E of the scattered electron measured by the H1 SPACAL calorimeter to the momentum p measured by the H1 BST versus E. Both measurements agree well.