Download
1 / 108
1.11k likes | 1.31k Views
Please do not distribute beyond MERS group. Structural Decomposition Methods for Constraint Solving and Optimization. Martin Sachenbacher February 2003. Outline. Decomposition-based Constraint Solving Tree Decompositions Hypertree Decompositions Solving Acyclic Constraint Networks

E N D
Please do not distribute beyond MERS group Structural Decomposition Methods for Constraint Solving and Optimization Martin Sachenbacher February 2003
Outline • Decomposition-based Constraint Solving • Tree Decompositions • Hypertree Decompositions • Solving Acyclic Constraint Networks • Decomposition-based Optimization • Dynamic Programming • Generalized OCSPs involving State Variables • Demo of Prototype • Decomposition vs. other Solving Methods • Conditioning-based Methods • Conflict-directed Methods
Outline • Decomposition-based Constraint Solving • Tree Decompositions • Hypertree Decompositions • Solving Acyclic Constraint Networks • Decomposition-based Optimization • Dynamic Programming • Generalized OCSPs involving State Variables • Demo of Prototype • Decomposition vs. other Solving Methods • Conditioning-based Methods • Conflict-directed Methods
Constraint Satisfaction Problems • Domains dom(vi) • Variables V = v1, v2, …, vn • Constraints R = r1, r2, …, rm • Tasks • Find a solution • Find all solutions
Methods for Solving CSPs • Generate-and-test • Backtracking • … “Guessing” • Truth Maintenance • Kernels • … • Analytic Reduction “Decomposition” “Conflicts”
Example r(E,B) E r(E,D) r(E,C) {1,2} 1 22 1 1 22 1 1 21 32 12 3 {1,2} {1,2,3} D C r(B,C) 1 22 1 {1,2} {1,2} A B r(D,A) r(A,B) 1 22 1 1 22 1
Example • Eliminate Variable E r(E,B) E r(E,D) r(E,C) {1,2} 1 22 1 1 22 1 1 21 32 12 3 {1,2} {1,2,3} D C r(B,C) 1 22 1 {1,2} {1,2} A B r(D,A) r(A,B) 1 22 1 1 22 1
Example r(B,C) r(D,B,C) 1 22 1 2 2 22 2 31 1 11 1 3 {1,2} {1,2,3} D C {1,2} {1,2} A B r(D,A) r(A,B) 1 22 1 1 22 1
Example (continued) • Eliminate variable D r(B,C) r(D,B,C) 1 22 1 2 2 22 2 31 1 11 1 3 {1,2} {1,2,3} D C {1,2} {1,2} A B r(D,A) r(A,B) 1 22 1 1 22 1
Example (continued) • Eliminate variable C r(A,B,C) r(A,B) 1 2 21 2 32 1 12 1 3 1 22 1 {1,2,3} C {1,2} {1,2} A B
Example (continued) • Eliminate variable B r(A,B) 1 22 1 {1,2} {1,2} A B
Example (continued) • Non-empty: Satisfiable! r(A) Backtrack-free 12 Extend “backwards”to find solutions {1,2} A
Idea of Decomposition • Computational Steps: Join, Project Var A: r(A) Var B: r(B,A) r(A,B) Var C: r(C,B) r(A,B,C) Var D: r(D,A) r(B,C,D) Var E: r(E,D) r(E,B) r(E,C)
Idea of Decomposition • Computational Scheme (acyclic) r(A) r(B,A) ⋈ r(A,B) r(C,B) ⋈ r(A,B,C) r(D,A) ⋈ r(B,C,D) r(E,D) ⋈ r(E,B) ⋈ r(E,C)
Idea of Decomposition • Alternative Scheme for the Example r(E,B) r(E,D) ⋈ r(B,D) r(E,C) ⋈ r(B,C) r(A,B) ⋈ r(A,D)
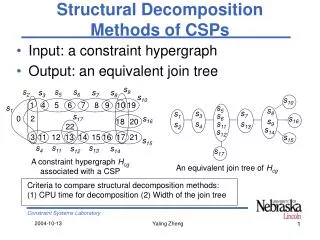
Tree Decompositions • A tree decomposition of a graph is a triple (T,,) where T=(N,E) is a tree, and are labeling functions associating with each node n N two sets (n) V, (n) R such that: • For each rj R, there is at least one n N such that rj (n) and scope(rj) (n) (“covering”) • For each variable vi V, the set {n N | vi (n)} induces a connected subtree of T (“connectedness”) • The tree-width of a tree decomposition is defined as max(|(n)|), n N.
Tree Decompositions • Comparing Tree Decompositions for the Example R(A) Tree-Width 4 R(E,B) R(B,A) ⋈ R(A,B) R(E,C) ⋈ R(B,C) R(C,B) ⋈ R(A,B,C) R(E,D) ⋈ R(B,D) Tree-Width 3 R(D,A) ⋈ R(B,C,D) R(A,B) ⋈ R(A,D) R(E,D) ⋈ R(E,B) ⋈ R(E,C)
Structural Decomposition Methods • Biconnected Components [Freuder ’85] • Treewidth [Robertson and Seymour ’86] • Tree Clustering [Dechter Pearl ’89] • Cycle Cutset [Dechter ’92] • Bucket Elimination [Dechter ‘97] • Tree Clustering with Minimization [Faltings ’99] • Hinge Decompositions [Gyssens and Paredaens ’84] • Hypertree Decompositions [Gottlob et al. ’99]
Tree Clustering • Example A B C D E F
Tree Clustering • Step 1: Select Variable Ordering A B C D E F
Tree Clustering • Step 2: Make graph chordal (connect non-adjacent parents) A A B B C C D E F
Tree Clustering • Step 3: Identify maximal cliques A B C D E F
Tree Clustering • Step 4: Form Dual Graph using Cliques as Nodes A,B,C,E E B,C,E D,E D,E,F B,C,D,E
Tree Clustering • Step 5: Remove Redundant Arcs Tree-Width 4 A,B,C,E (E) B,C,E D,E D,E,F B,C,D,E
Tree Clustering • Alternative variable order F,E,D,C,B,A produces Tree-Width 3 F,D D B,C,D B,C (B) A,B,C B,A A,B,E
Decomposing Hypergraphs • Possible Approach: Turn hypergraph into primal/dual graph, then apply graph decomposition method • But: sub-optimal, conversion loses information • Idea [Gottlob 99]: Generalize decomposition to hypergraphs
Hypertree Decompositions • A triple (T,,) such that: • For each rj R, there is at least one n N such that scope(rj) (n) (“covering”) • For each variable vi V, the set {n N | vi (n)} induces a connected subtree of T (“connectedness”) • For each n N, (n) scope((n)) • For each n N, scope((n)) (Tn) (n), where Tn is the subtree of T rooted at n • The hypertree-width of a hypertree decomposition is defined as max(|(n)|), nN.
Tree-Width vs. Hypertree-Width • Class of CSPs with bounded HT-width subsumes class of CSPs with bounded tree-width ([Gottlob 00]) • Determining the HT-width of a CSP is NP-complete • For each fixed k, it can be determined in polynomial time whether the HT-width of a CSP is k
Game Characterization: Tree-Width • Robber and k Cops • Cops want to capture the Robber • Each Cop controls a node of the graph • At any time, Robber and Cops can move to neighboring nodes • Robber tries to escape, but must avoid nodes controlled by Cops
Playing the Game q b a d g c f e p h j l i k o n m
First Move of the Cops q b a d g c f e p h j l i k o n m
Shrinking the Space q b a d g c f e p h j l i k o n m
The Capture q b a d g c f e p h j l i k o n m
Game Characterization: HT-Width • Cops are now on the edges • Cop controls all the nodes of an edge simultaneously
Playing the Game V P R S X Y T Z U W
First Move of the Cops V P R S X Y T Z U W
Shrinking the Space V P R S X Y T Z U W
The Capture V P R S X Y T Z U W
Different Robber’s Choice V P R S X Y T Z U W
The Capture V P R S X Y T Z U W
Strategies and Decompositions • Theorem: A hypergraph has hypertree-width k iff k Cops have a winning strategy • Winning strategies correspond to decompositions and vice versa
First Move of the Cops a(S,X,T,R) ⋈ b(S,Y,U,P) V P R S X Y T Z U W
Possible Choice for the Robber a(S,X,T,R) ⋈ b(S,Y,U,P) V P R S X Y T Z U W
The Capture a(S,X,T,R) ⋈ b(S,Y,U,P) c(R,P,V,R) V P R S X Y T Z U W
Alternative Choice for the Robber a(S,X,T,R) ⋈ b(S,Y,U,P) c(R,P,V,R) V P R S X Y T Z U W
Shrinking the Space a(S,X,T,R) ⋈ b(S,Y,U,P) c(R,P,V,R) d(X,Y) ⋈ e(T,Z,U) V P R S X Y T Z U W
The Capture a(S,X,T,R) ⋈ b(S,Y,U,P) c(R,P,V,R) d(X,Y) ⋈ e(T,Z,U) V P R S d(X,Y) ⋈ f(W,X,Z) X Y T Z U W
Decomposition a(S,X,T,R) ⋈ b(S,Y,U,P) HT-Width 2 c(R,P,V,R) d(X,Y) ⋈ e(T,Z,U) d(X,Y) ⋈ f(W,X,Z)
Decomposition-based CSP Solving • Turn CSP into equivalent acyclic instance • Solve equivalent acyclic instance (polynomial in width) W(E,C) R(A,B) ⋈ S(D,A) U(E,D) T(B,C) T(B,C) ⋈ U(E,D) V(E,B) “Compilation” S(D,A) R(A,B) V(E,B) W(E,C)
Solving Acyclic CSPs • Bottom-Up Phase • Consistency check • Top-Down Phase • Solution extraction • Polynomial complexity • Highly parallelizable