Download
1 / 1
30 likes | 228 Views
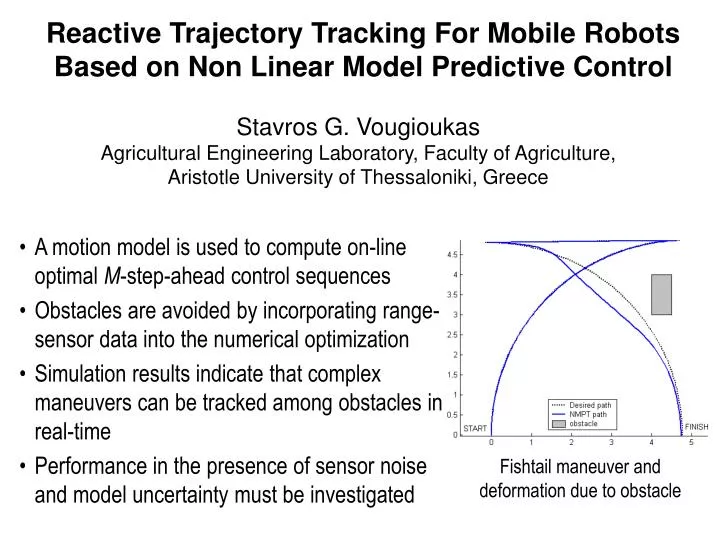
Reactive Trajectory Tracking For Mobile Robots Based on Non Linear Model Predictive Control. Stavros G. Vougioukas Agricultural Engineering Laboratory, Faculty of Agriculture, Aristotle University of Thessaloniki, Greece.

E N D
Reactive Trajectory Tracking For Mobile Robots Based on Non Linear Model Predictive Control Stavros G. VougioukasAgricultural Engineering Laboratory, Faculty of Agriculture, Aristotle University of Thessaloniki, Greece • A motion model is used to compute on-line optimal M-step-ahead control sequences • Obstacles are avoided by incorporating range-sensor data into the numerical optimization • Simulation results indicate that complex maneuvers can be tracked among obstacles in real-time • Performance in the presence of sensor noise and model uncertainty must be investigated Fishtail maneuver and deformation due to obstacle