Download
1 / 12
140 likes | 341 Views
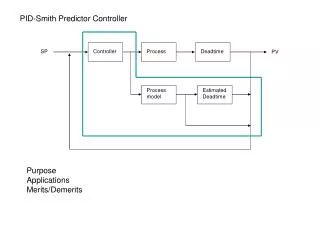
PID controller Control engineering and signal processing Michala Srnová 2009/2010. Content. Compensator P compensator PI compensator Lead compensator Lag compensator PID controller. PID controller. Proportional + integral + derivative Transfer function: K D – derivative gain

E N D
PID controller Control engineering and signal processing Michala Srnová 2009/2010
Content • Compensator • P compensator • PI compensator • Lead compensator • Lag compensator • PID controller
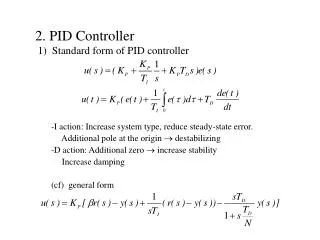
PID controller • Proportional + integral + derivative • Transfer function: • KD – derivative gain • Used in majority of closed-loop industrial processes
PID controller • Step response • Rise time • Overshoot • Settling Time • Steady state Error • Effect of increasing the parameters:
Tune • Alter step response • Find out parameter Kp, Ki, Kd • Various methods • Manual Tuning • Ziegler-Nichols • Software Tools • Cohen-Coon
Manual Tuning • No math required • On-line method • What in characteristic need to be improved • Kp – decrease the rise time • Kd – reduce overshoot and settling time • Ki – eliminate steady state error • Does not work in every time
Ziegler-Nichols • Rules for determine Kp, Ki, Kd • Based on step response • Proposed more methods • First method – Step response method • No integrators • No dominant complex-pairs • Response: s-shape, no overshoot • Ʈ, a
Ziegler-Nichols • Parameters Ʈ and a – calculating • Drawbacks: lack robustness • Improvement : K, Ʈ, T in model • From step response
Ziegler Nichols • Second method – frequency response • Ki and Kd =0, setting of Kp • Starting of ocsillations → Kc, period – Tc • These values used to calculate Kp,Ki,Kd
Software Tuning • Modern industrial facilities • Online, offline method • Software will • Gather data • Develop process model • Suggest optimal tuning • Principle • Mathematical loops • Frequency response to impulse • Design PID loop values