Download
1 / 1
30 likes | 230 Views
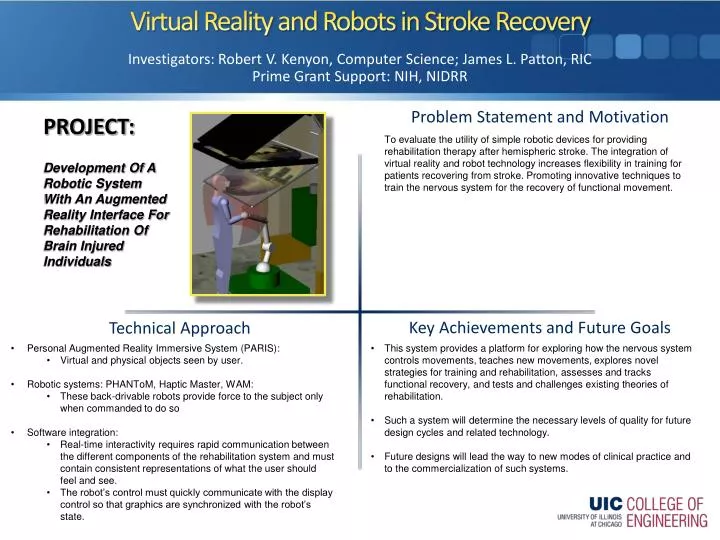
Virtual Reality and Robots in Stroke Recovery. Investigators: Robert V. Kenyon, Computer Science; James L. Patton, RIC Prime Grant Support: NIH, NIDRR. PROJECT: Development Of A Robotic System With An Augmented Reality Interface For Rehabilitation Of Brain Injured Individuals.

E N D
Virtual Reality and Robots in Stroke Recovery Investigators: Robert V. Kenyon, Computer Science; James L. Patton, RIC Prime Grant Support: NIH, NIDRR PROJECT: Development Of A Robotic System With An Augmented Reality Interface For Rehabilitation Of Brain Injured Individuals To evaluate the utility of simple robotic devices for providing rehabilitation therapy after hemispheric stroke. The integration of virtual reality and robot technology increases flexibility in training for patients recovering from stroke. Promoting innovative techniques to train the nervous system for the recovery of functional movement. • Personal Augmented Reality Immersive System (PARIS): • Virtual and physical objects seen by user. • Robotic systems: PHANToM, Haptic Master, WAM: • These back-drivable robots provide force to the subject only when commanded to do so • Software integration: • Real-time interactivity requires rapid communication between the different components of the rehabilitation system and must contain consistent representations of what the user should feel and see. • The robot’s control must quickly communicate with the display control so that graphics are synchronized with the robot’s state. • This system provides a platform for exploring how the nervous system controls movements, teaches new movements, explores novel strategies for training and rehabilitation, assesses and tracks functional recovery, and tests and challenges existing theories of rehabilitation. • Such a system will determine the necessary levels of quality for future design cycles and related technology. • Future designs will lead the way to new modes of clinical practice and to the commercialization of such systems.