Download
1 / 24
240 likes | 407 Views
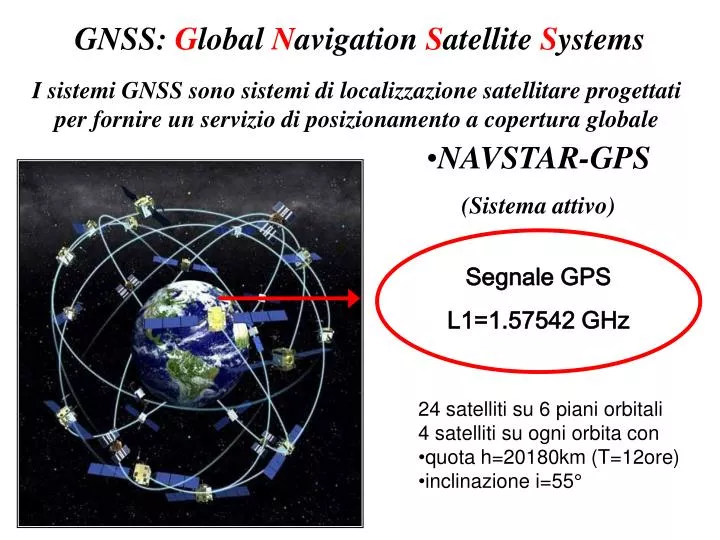
GNSS: G lobal N avigation S atellite S ystems. I sistemi GNSS sono sistemi di localizzazione satellitare progettati per fornire un servizio di posizionamento a copertura globale. NAVSTAR-GPS (Sistema attivo). Segnale GPS L1=1.57542 GHz. 24 satelliti su 6 piani orbitali

E N D
GNSS: Global Navigation Satellite Systems I sistemi GNSS sono sistemi di localizzazione satellitare progettati per fornire un servizio di posizionamento a copertura globale • NAVSTAR-GPS • (Sistema attivo) Segnale GPS L1=1.57542 GHz • 24 satelliti su 6 piani orbitali • 4 satelliti su ogni orbita con • quota h=20180km (T=12ore) • inclinazione i=55°
Segnale GPS Riflesso Il segnale riflesso dalla superficie terrestre contiene informazioni sulla superficie stessa • V a n t a g g i • Segnale già esistente, disponibile gratuitamente (segnale di opportunità). • Sistema bistatico: trasmettitore e ricevitore appartengono a differenti piattaforme. E’ richiesta solo l’implementazione del ricevitore. • Sv a n t a g g i • Il segnale GPS è molto debole e dopo l’interazione con la superficie terrestre può essere rivelato solo nella direzione speculare rispetto a quella di incidenza
Il segnale GPS L’unico sistema di navigazione attualmente attivo è il Global Positioning System. I satelliti nella costellazione GPS trasmettono due segnali portanti indicati con L1 e L2. • fL1=1575,42 MHz • fL2=1227,60 MHz Modulazione portanti L1 L2 • C/A code • P code • Navigation message • P code • Navigation message
Coarse/Acquisition code Il C/A code è un codice pseudo-random, formato da una sequenza di 1 e 0. Ogni elemento del codice è chiamato chip (invece di bit) • durata chip = 977.5 ns • durata codice (1023 chip) = 1 ms • chip rate= 1,023 MHz Ogni satellite della costellazione GPS ha un C/A code diverso identificato da un numero PRN Mediante operazioni di crosscorrelazione dei C/A code è possibile identificare quale satellite è in trasmissione.
receiver slides replica of code in time until finds correlation with SV signal (codes are series of digital numbers)
if receiver applies different PRN code to SV signal …no correlation when receiver uses same code as SV and codes begin to align …some signal power detected
Coarse/Acquisition code autocorrelazione codice C/A satellite 6 intercorrelazione codice C/A satellite 6 e 12
Onda piana riflessa Superfici equifase Onda piana incidente Onda è riflessa da un unico punto Casoideale riflessione speculare superficie piana infinitamente estesa Esiste una relazione di fase fissa tra l’onda incidente e quella riflessa: coerenza di fase
Riflessione speculare Onda piana incidente su superficie di dimensioni finite determinate dal beamwidth dell’antenna trasmittente X0 è il punto speculare Anche il punto P invia un segnale verso il ricevitore Fin quando la differenza di fase tra l’onda riflessa da X0 e quella proveniente da P è < i due segnali vengono considerati coerenti. La riflessione speculare non avviene solo nel punto X0 ma in un’ellisse chiamata prima zona di Fresnel φ(P) – φ(X0) ≤ π 9
La prima zona di Fresnel L’area che apporta il contributo rilevante al segnale totale ricevuto tramite riflessione speculare Semiasse maggiore Semiasse minore
Prima zona di Fresnel per ricevitori a diverse quote h=700 km h=400 km h=5 km 0.41 km 1.2 km 0.05 km
The GNSS-R system GNSS-Reflectometry is a form of bistatic microwave remote sensing: • the transmitter is located on a GNSS satellite with a nominal orbit altitude H=20200 km • the receiver (at height h) simultaneously measures both the direct signal and the signal reflected from the Earth surface
The reflected signal will arrive later than the direct one, since it travels a longer path to the receiver. The basic principle in GNSS-R altimetry is that reflection from the specular point can be tracked and the measurement of the arrival time difference () allows receiver height measurements Specular Point =green – blue is the path difference
Forme d’onda del segnale riflesso Il ricevitore GPS esegue la crosscorrelazione tra il segnale riflesso ricevuto e il segnale diretto, ottenendo la cosiddetta forma d’onda. Confronto fra la forma d’onda del segnale diretto e del segnale riflesso: • ritardo τdel segnale riflesso τ • abbassamento del picco della forma d’onda
Il ritardo del segnale riflesso Il ritardo τè legato alle quote del trasmettitore e del ricevitore (H e h), nonché all’angolo d’incidenza θ. θ Il ritardo diminuisce con il crescere dell’angolo di incidenza. Rd R1 H R2 h T2 T1 Forme d’onda al variare dell’angolo di incidenza
Applicazioni altimetriche Invertendo le formule precedenti, dal ritardo ricavo l’altezza h Conoscendo l’altezza del ricevitore rispetto al geoide terrestre (HNAP) è possibile ricavare l’altezza delle onde =HNAP-h
Applicazioni scatterometriche Cambiamento della forma d’onda Abbassamento del picco Allargamento della curva CASO IDEALE Quanto più è grande la glistening zone tanto più è larga la forma d’onda CASOREALE E’ possibile risalire alla rugosità della superficie e quindi alla velocità del vento sul mare Confronto tra caso ideale e caso reale
Riflessione dal mare • Uscite del correlatore (dati acquisiti da UK-DMC) 4 m/s 12. m/s • La glistening zone si allarga e il coefficiente di scattering nella direzione speculare si abbassa al crescere del moto ondoso
Scatterometry Fitting of the trailing edge of the waveform is the most widely used technique for wind speed inversion (Komjathy et al., 2000, Garrison et al., 2002, Zuffada et al., 2003), even though some best fit is also performed on the leading edge (Hajj and Zuffada, 2002) or on the whole waveform (Komjathy et al., 2001, Gleason et al., 2005). An example (Komjathy et al., 2000) of the wind speed retrieved by GNSS-R measurements is reported in figure 4.4, where a comparison with TOPEX data shows an agreement within 2 m/s
Experimental activities Waveforms from land surfaces indicate that scattering from soil is mainly specular The waveforms have triangular shapes Some reflected waveforms from the SMEX campaign The direct signal
Il coefficiente di riflessione Il coefficiente di riflessione Γè il rapporto tra il campo elettrico riflesso e quello incidente; il suo valore dipende dalla polarizzazione del raggio incidente. Il segnale GPS è inviato in polarizzazione circolare destra. ΓLR=(Γv - Γh)/2 inversione polarizzazione Γ conservazione polarizzazione ΓRR=(Γv + Γh)/2 con Γ=ΓLR θ < 60°
Il picco delle forme d’onda varia al variare dell’umidità del suolo. Percentuale di umidità maggiore Picco della forma d’onda più alto Il suolo umido riflette maggiormente l’onda rispetto al suolo secco, cosicché al ricevitore arriva un segnale caratterizzato da maggiore potenza.
SMEX02 (Masters et al., 2004) Data Collected: Soil Moisture (TDR and Theta Probe) Precipitation Canopy height, leaf and stem water content Soil RMS height Simultaneous radiometric measurements 21 Corn Fields Soybean Fields 1 Grass Field
SMEX02 (Masters et al., 2004) • GPS reflected SNR vs. volumetric soil moisture for all sites. • Generally exhibits expected trend • Large dispersion suggests dependence on other geophysical parameters (besides SMC) and incidence angle