Download
1 / 48
480 likes | 772 Views
Collisions (and explosions). The conservation of energy is a very powerful law. It is easy to use, mainly because it eliminates time and directions . But because it eliminates time and directions, it does have its limitations.

E N D
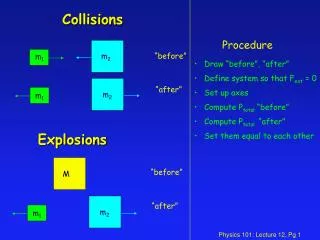
Collisions (and explosions) The conservation of energy is a very powerful law. It is easy to use, mainly because it eliminates time and directions. But because it eliminates time and directions, it does have its limitations. In collisions, the directions of the pieces (both before and after) are important. To attack this problem, we will go back to Newton’s Second Law.
Newton’s Second Law We have worked with Newton’s Second Law in the following form: SFx = max and SFy = may, where acceleration is defined as: ax = Dvx/Dt and ay = Dvy/Dt . If mass doesn’t change with motion, which seems to be true, at least at everyday speeds, then we can put the m inside the D:
Momentum S Fx = D(mvx)/Dt and S Fy = D(mvy)/Dt . We can re-write this as: (SFx)*Dt = D(mvx)and (SFy)*Dt = D(mvy) The quantity on the right side of the above equations, mv, has its own name: momentum: p = mv Since m is a scalar and v is a vector, p is also a vector.
Impulse (SFx)*Dt = D(mvx)and (SFy)*Dt = D(mvy) The quantity on the left side of the above equations also has a name: impulsex = (SFx)*Dtand impulsey = (SFx)*Dt . When we have collisions, the forces of collision usually happen in very short times, and the details of these collisions are hard to determine.
Collisions However, since Newton’s Second Law relates the impulse to the change in momentum, we can determine the impulse by determining the change in momentum. Further, by determining the time during which the collision took place (Dt), we can obtain information about the (average) forces of collision!
Collisions There is also another use of Newton’s Second Law for collisions when we use it in combination with Newton’s Third Law (Fby 2on 1 = - Fby 1on 2) S Fx on 1 = Fexton 1 + Fby 2on 1 = D(m1vx1 )/Dt S Fx on 2 = Fexton 2 + Fby 1on 2 = D(m2vx2 )/Dt. If we add the left sides and add the right sides of the above two equations, we get the forces of collision canceling out!
Conservation of Momentum Fxext on 1 + Fxext on 2 = D(px1 + px2) / Dt . Ifthe external forces are small, or if the time of the collision, Dt, is small, then we have: D(px1 + px2) = 0. This can be re-written as: (px1 + px2)i = (px1 + px2)f. This is called Conservation of Momentum. This is a vector law, so a similar equation holds for each component of momentum.
1-D examples In one dimensional collision cases, we can apply two laws: Conservation of Momentum and Conservation of Energy(here we assume there are no PE’s that change): (1/2)m1v1i2 + (1/2)m2v2i2 = (1/2)m1v1f2 + (1/2)m2v2f2 + Elost m1v1i + m2v2i = m1v1f + m2v2f These are two equations with 7 quantities: m1, m2, v1i, v2i, v1f, v2f, Elost . Hence if we know five, we can solve for the other two.
1-D Collisions We can divide the collisions into three cases: 1. The two objects can bounce off of each other without any Elost. This is called an elastic collision. This means Elost = 0. 2. The two objects can stick to each other. This means v1f = v2f . 3. The objects can be deformed but still not stick to one another. No special information is available in these cases.
1-D Collisions In the first two cases, we can predict the final motion (solve for v1f , v2f and Elost) if we know the initial motion (m1, m2, v1i, v2i). In the third case, we would have to know something besides the initial motion to solve for the final. When you think about it, this does make sense, since in the third case the results of the collision should depend on the material of the colliding objects!
1-D Example A lead bullet of mass 5 grams collides and sticks inside a block of wood of mass 400 grams. After the collision, the block of wood (with the bullet embedded) moves at a speed of 4 m/s. How fast was the initial speed of the bullet? How much energy was “lost” to denting the block?
1-D example, cont. This is a collision problem, so we have (1/2)m1v1i2 + (1/2)m2v2i2 = (1/2)m1v1f2 + (1/2)m2v2f2 + Elost m1v1i + m2v2i = m1v1f + m2v2f We know: m1 = 5 grams, m2 = 400 grams, v2i = 0 m/s (wood block is at rest initially), v1f = v2f = 4 m/s (since bullet becomes embedded in block). We are looking for v1iand Elost.
1-D Example, cont. Using the second equation, we can solve for v1i: m1v1i + m2v2i = m1v1f + m2v2f Since v2i = 0, and v1f = v2f = 4 m/s, we have v1i =(5 grams + 400 grams)*(4 m/s) / 5 grams = 324 m/s . Now we can use the first equation to solve for Elost :
1-D Example, cont. (1/2)m1v1i2 + (1/2)m2v2i2 = (1/2)m1v1f2 + (1/2)m2v2f2 + Elost Elost= (1/2)*(.005 kg)*(324 m/s)2 - (1/2)(.005 kg + .400 kg)*(4 m/s)2 = 259.20 Joules. Note that almost all of the initial energy [total initial energy = (1/2)m1iv1i2 = 262.44 Joules)] went into denting the wood block!
1-D Example modified What would be the speed of the block if the bullet were rubber and bounced off the block instead of denting it and sticking? Would the block be going faster or slower after the collision with the “rubber” bullet as opposed to the “lead” bullet?
1-D Example Modified In this case, we still have a collision, so we have the same equations. But in this case, we know Elost = 0, and v1i = 324 m/s. We do not know v1f and v2f. Thus we still have two equations and need to solve them for two unknowns! Here, however, both unknowns are in both equations. We need to solve them simultaneously.
1-D Example Modified We use the simpler second equation first: m1v1i + m2v2i = m1v1f + m2v2f to get v1f= (m1v1i - m2v2f)/m1(since v2i = 0). We use this value for v1f in the second equation: (1/2)m1v1i2 + (1/2)m2v2i2 = (1/2)m1v1f2 + (1/2)m2v2f2 + Elost But we know Elost = 0 and v2i = 0, so we get: (1/2)m1v1i2 + 0 = (1/2)m1[(m1v1i - m2v2f)/m1]2 + (1/2)m2v2f2+ 0.
1-D Example Modified (1/2)m1v1i2 = (1/2)m1[(m1v1i - m2v2f)/m1]2 + (1/2)m2v2f2. When we multiply out the above equation, we get a quadratic equation for v2f . This gives two answers: v2f = 0 m/sor v2f = 8 m/s. The first answer corresponds to a miss, but that is not what we want. The second answer is what we want.
Comparisons Notice that the rubber bullet gave about twice the kick to the wood block that the lead bullet did! If we think about it, the rubber bullet caused the wood block to catch it, and then throw it back! The lead bullet only was caught by the block - it was not thrown back. Hence the block was kicked more by the rubber bullet.
2-D Collisions In two dimensions, we have the scalar Conservation of Energy equation plus the two component equations of Conservation of Momentum. This gives three equations, one more equation than we had with 1-D.. However, we have four more quantities: v1yi, v2yi, v1yf and v2yf. Usually we know the initial quantities, but this still leaves two more unknowns with only one more equation.
2-D Collisions This does make sense, since there are lots of ways for two objects to collide in 2-D - a head on collision or a variety of glancing collisions! We should need to know something about how the collision happened! In this course we will not do any problems involving 2-D collisions due to the messy algebra involved.
Explosions Explosions can be viewed as collisions run backwards! Instead of Elost , we will need Esupplied by the explosion. If you shoot a gun, there is a kick. If you hit a ball, there is a “kick” - if you swing and miss, you are out of balance since you expected a “kick” that didn’t come! From Conservation of Momentum, we can see the reason for the “kick”:
Explosions Normally, in an explosion the initial object is in one piece and at rest. After the explosion, one piece goes forward. Conservation of Momentum says the other piece must then go backwards. (If we brace ourselves, we can compensate for that backwards push and not fall over.) 0 + 0 = m1v1f + m2v2f or v2f = - m1v1f / m2.
Rockets A special case of explosions is when the explosions are controlled and continuous: a rocket and a jet are examples. By throwing the exhaust gases out the back, the engine pushes the body of the plane or rocket forward - by conservation of momentum. But since this is a continuous process (rather than a series of discrete shots), we need the calculus to derive a nice formula.
Rockets That nice formula from Conservation of Momentum using the calculus is: vf = vo + vexhln(mi/mf) where vexh is the speed with which the rocket or jet engine throws the gases out the back. As the rocket burns its fuel, its mass (including the remaining fuel) goes down.
Rockets The thrust, or force, that the engine delivers to the rocket or plane depends on how fast the gases are exhausted and how much fuel is used: Thrust = Fon rocket = vexhDm/Dt . The Trolley-Sled computer homework program and the Moonlanding computer homework program are examples that show the result of using rockets to cause changes in motion.
Rotational Dynamicsreview of rotational statics In Part 2 we looked at uniform circular motion: r = constant (def. of circular motion) w = Dq/Dt = constant(q changes with time at uniform rate) vr = 0 (radius doesn’t change) vq = wr (vq = constant since both r and w are constant) ar = w2r (v changes direction toward center) aq = 0 (angular and tangential speed don’t change)
Rotational DynamicsAngular Acceleration Here we generalize circular motion to include the case where the angular speed can change. We define angular acceleration as: a = Dw/Dt . [Recall arclength = s, and =s/r, so s=r, vq=r] Since aq = Dvq/Dt = D(wr)/Dt = r(Dw/Dt) = ar. We still have all the equations we had before, except aq is no longer zero but is instead ar.
Constant Angular Acceleration In the special case of constant angular acceleration (a = constant), we have equations analogous to those we had for constant (regular) acceleration: q = qo+ wot +(1/2)at2 and w = wo + at like x = xo + vxot + (1/2)axt2andvx = vxo + axt.
Constant Angular Acceleration If a car rolls on wheels thatdo not slip, we can relate the motion of the car to the spinning of the wheels: s = distance of car = arclength of wheels, v = speed of car = v of wheels, a = acceleration of car = a of wheels; q = angle of wheel, w = angular speed of wheel, and a = angular acceleration of wheel:
Constant Angular Acceleration s = rq, r = constant v = rw = vq vr=0 a = ra = aq ar = w2r (due to turning) For constant acceleration: s = so + vot + (1/2)at2 v = vo + at q = qo + wot + (1/2)at2w = wo + at . This gives many relations so that, by knowing just a few things, we can solve for many other things about the motion.
Rotational DynamicsTorque and Rotations Forces cause changes in motion. Torques cause changes in rotational motion. Forces are related to acceleration by Newton’s Second Law: S F = ma. How are t and a related?
Rotational Dynamics Consider: S F = ma . t = r F sin(qrF) . If we multiply both sides by r sin(qrF) we get S t = m a r sin(qrF) , but a sin(qra) = aq = ar, so S t = mr2a . If the mass is distributed at various radii, then the mr2 becomes S miri2 . We define the moment of inertia be be I = S miri2 so that we have S t = Ia .
Moment of Inertia Note that the moment of inertia relates the torque to the angular acceleration just like the mass relates the force to the regular acceleration. Note that the moment of inertiadepends on the mass of the objectAND also on the shape of the object.
Moment of Inertia Things that have most of their mass in the center have smaller moments of inertia than things that have most of their mass on the outside. Using the calculus, we can derive nice formulas for the moments of inertia of certain shapes: Iring = MR2 Isphere = (2/5)MR2; Icylinder = (1/2)MR2 .
Sphere versus Cylinder axis The blue object in the figures is the side view of a cylinder with the same radius and volume (mass) as the orange object (a sphere). Note that most of the mass is in the same place, but the top and bottom of the sphere must be moved away to provide the corners for the cylinder. Hence, the Moment of Inertia of the cylinder is slighly larger than that of the sphere: Isphere = (2/5)MR2 ; Icylinder = (1/2)MR2 . R
Rotational Equations In the same way, we can derive nice formulas for the kinetic energy and (angular) momentum due to the spinning of an object; basically we replace F with t, m with I, v with w, a with aandp with L (where L is the angular momentum): S F = ma S t = Ia KE = (1/2)mv2KErotation = (1/2)Iw2 p = mv L = Iw S F = Dp/DtS t = DL/Dt .
Rotational Equations The rotational kinetic energy formula is used as another energy in the Conservation of Energy Law. The Angular Momentum (L) relation is used in the Law of Conservation of Angular Momentum, just as regular (linear) momentum is used in the Conservation of Momentum.
Rotational Energy Example: rolling ball How fast will a ball be going at the base of a ramp if it is released at the top of the ramp, where the length of the ramp is 2 meters and the high end is 50 cm above the floor (base of the ramp)? We assume the ball rolls without slipping. Does the mass or radius of the ball affect the speed? If a cylinder of the same mass and radius were also released, would the ball or cylinder win the race down the ramp?
Rolling ball Ball: vi = 0, wi=0 mass = m radius = r hi = 50 cm s = 2 meters vf = ?
Rolling ball We could use Newton’s Laws of Motion: SF = ma, and St = Ia along with a=ar and the equations for constant acceleration, or we could use Conservation of Energy (KEregular + KErotational + PEgravity)initial = (KEregular + KErotational + PEgravity)initial + Elost along with v=wr.
Rolling ball Since we’re not interested in direction or time, we’ll use Conservation of Energy. We know that for a ball (sphere),I = (2/5)mr2. We know that KEregular = (1/2)mv2 . We know that KErotational = (1/2)Iw2. We know that PEgravity = mgh . We know that without slipping, even though friction causes the ball to roll, there is no Elost because the fall does not slide.
Rolling ball Conservation of Energy (KEregular + KErotational + PEgravity)initial = (KEregular + KErotational + PEgravity)initial + Elost 0 + 0 + mgh = (1/2)mv2 + (1/2)Iw2 + 0 + 0. Substituting I=(2/5)mr2 and w=v/r gives: mgh = (1/2)mv2 + (1/2)[(2/5)mr2][v2/r2] , or mgh = (1/2)mv2 + (1/5)mv2 = (7/10)mv2 .
Rolling ball mgh = (7/10)mv2 which becomes when solving for v: v = [(10/7)gh]1/2 = [(10/7)*9.8m/s2 * .50m] = 2.645 m/s. Note: both the mass and the radius cancel out of the solution, and so the mass and radius don’t matter.
Rolling ball Note: the angle of the ramp doesn’t make any difference either, since only the height and not the length is involved. The steeper the ramp, the faster the ball will reach its final speed, but the final speed will not be affected!
Sphere versus Cylinder Would a cylinder or a sphere win a race down the ramp? What difference does the shape make in our equation? The difference comes in the KE for rotations in the moment of inertia, I. For a sphere (ball), I = (2/5)mr2, while for a cylinder it would be I=(1/2)mr2. This ultimately changes the (10/7) factor into (4/3), the value from 2.65 m/s to 2.55 m/s.
Sphere versus Cylinder We can understand the slightly lower speed for the cylinder by considering that the moment of inertia of the cylinder is larger. This will make the kinetic energy larger for the same speed. Hence there will be less kinetic energy for the regular speed if we have the same potential energy to begin with!
Angular Momentum In class we will observe several demonstrations about Angular Momentum and talk about its uses in controlling rockets and spinning athletes (divers and gymnasts in particular). We will also show how angular momentum relates to riding bicycles, and how this relates to the spinning earth!