Download
1 / 1
10 likes | 99 Views
GLAM-PS is a draft cognitive architecture implemented for knowledge-lean problem solving, focusing on the Tower of London task. Representing goals modally, the system integrates visual, spatial, tactile, and auditory modules to execute goal-driven behavior. Implemented with similarities to ACT-r and SOAR, GLAM-PS emphasizes grounded cognition and bottleneck module processing. The theory underpinning GLAM-PS includes assumptions on output module responses and modal storage of long-term memories.

E N D
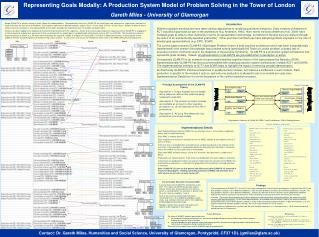
Representing Goals Modally: A Production System Model of Problem Solving in the Tower of London Gareth Miles - University of Glamorgan Output Threshold Visual/Spatial Input Module Manual Output Module PRODUCTION MEMORY Diagrammatic Summary of GLAM-PS (LTM = Long Term Memory, WM = Working Memory LTM PRODUCTION MEMORY B LTM System State Representation [Contains most active WM elements from each module] Tactile Input Module The Physical Body Visual Focus Output Module The World B PRODUCTION MEMORY PRODUCTION MEMORY LTM A 2 LTM Speech Output Module Auditory Input Module PRODUCTION MEMORY LTM PRODUCTION MEMORY LTM Below GLAM-PS is ‘shown’ solving a 3-disk Tower of London problem. The productions that fire in GLAM-PS are listed (each row represents a single cycle, with the first cycle at the top, the last one at the bottom). Each column represents a different modules actions (VisIn = Visual Input, VisFoc = Visual Focus). Actions in bold are those actions that are executed (i.e. the representation of the action exceeds the Action Execution Threshold, see below right) Arrows have been added to this diagram to illustrate the flow of control in this sequence. Arrows of the same colour represent sequences where GLAM-PS is engaged in a linked sequence of behaviour equivalent to that associated with an explicit goal in amodal/modal architectures such as ACT-r and SOAR. The hierarchical nature of these sequences is shown, e.g. the black arrows illustrate the ‘top goal’, initially a ‘subgoal’ of moving Disk C to Peg 3 is added (red arrows), a ‘sub-subgoal’ is then added to remove the blocking disks (A and B) to Peg 2 (blue arrows). In most cases, but not all, the intention to move a disk is the WME effectively exerting control. Introduction Different cognitive architectures have taken various approaches to modeling goal driven behaviour. Early versions of Anderson’s ACT included a goal stack as part of the architecture (e.g. Anderson, 1993), more recent versions (Anderson et al., 2004) have modeled goals as alike to other memories in terms of representation and storage, but distinct in the way they are utilised (through the action of an architecturally specified goal buffer). Other prominent architectures have placed significant emphasis on the role of amodal goal representations (e.g. EPIC, SOAR). The current paper presents GLAM-PS (Glamorgan Problem Solver) a draft cognitive architecture which has been computationally implemented in the domain of knowledge-lean problem solving (specifically the Tower of London problem, a classic test of executive function commonly used in the diagnosis of Dyexecutive Syndrome). GLAM-PS is a production system architecture that represents goals modally. Indeed, all representations in GLAM-PS are grounded either in perception or action Conceptually GLAM-PS is an example of a grounded/embodied cognition theory of the type proposed by Barsalou (2008). Implementationally GLAM-PS has strong commonalities with existing production system architectures (notably ACT-r and SOAR). The implementational similarity to ACT-r and SOAR helps to highlight the impact of removing amodal representation. Architecturally GLAM-PS matches productions in parallel across modules, but features a bottleneck in each module. Each production is specific to the module it acts on, and only one production is allowed to act on a module per cycle (see Implementational Details box for a brief description of the conflict resolution process). Principal Assumptions of the GLAM-PS Theory Assumption 1: Output modules can be loaded with a response, without that response being necessarily executed Assumption 2: The contents of output modules are available as an input to other cognitive processes (i.e. can be matched on the LHS of productions) Assumption 3: All Long Term Memories (incl. productions) are stored modally. Examples of GLAM-PS 2.0 Productions Implementational Details Each Working Memory Element (WME) has an activation level (1 unit or above is optimally active, and is treated identically) Each WME is module specific Each module has a maximum activation level of all WMEs specific to that module (set to 2.5 units currently). If the max level is exceeded then activation levels are decreased across the module (so the max level is not exceeded), if a production decreases activation then activation is increased across the module (so the current level is maintained). Each cycle WME activation decays (set to 10% currently). No adjustment is made for this decay. Productions are module specific. Each cycle, one production from each module is executed. If more than one production matches for a given module then the activation of the WMEs that matched these productions is summed. The production with the greatest summed activation is executed. Note: GLAM-PS 2.0 (seen on this poster) has differences with GLAM-PS 1.0 (featured in the proceedings paper). Notably, spreading activation of WMEs and activation from LHS references are both currently ‘turned off’. Prod disk_requires_move_different_peg_6 =VisIn name =disk_focus type disk label =disk_id display goal_state peg NOT[=peg_id] =VisIn name =old_disk_focus type disk label =disk_id peg =peg_id display current_state =manual name =move1 type disk_move from_peg [EMPTY] == =manual name =move1 type disk_move disk =old_disk_focus from_peg =peg_id activate +1 End Prod Prod find_disk_in_goal_display_5 =VisIn name =disk_focus type disk label =disk_id display current_state =manual name =move1 type disk_move disk [EMPTY] to_peg [EMPTY] not_to [EMPTY] -VisIn name =not_already_being_looked_at type disk label =disk_id display goal_state == +VisFoc type search_for_match target_type disk label =disk_id search_area goal_state activate +20 End Prod The Activation Execution Threshold (AET) A crucial feature of GLAM-PS’s architecture is the AET. This allows GLAM-PS to consider actions without necessarily executing them (currently an action is executed when its activation is greater than 20 units). See assumptions 1 and 2. Such a construct has interesting theoretical ramifications for i.) the modelling of global system states (e.g. emotions like fear) and ii.) the modelling of phonological/articulatory loop. Notably, it allows inner speech and expressed speech to be modelled in one module. Findings The competence of GLAM-PS (1.0 and 2.0) has been compared to that of human participants using data from 231 three disk problem solutions (on 5 different problems), 340 four disk problem solutions (on 6 different problems) and 241 five disk problem solutions (on 6 different problems). Ninety-four percent of these solutions were adequately modeled without the need for ‘guessed’ moves (some of the remaining six percent may have involved such moves).] Crucially, The model demomstrates goal driven behaviour and hierarchical subgoaling without the need for explicit amodal goal representations. In this case representations of intended manual actions (held in the manual module) control behaviour, but in other domains control is likely to be achieved by representations in different modules, e.g. the speech module for algebra problem solving), the visual input module for visual search. The architecture hypothesises a critical role for inter-module awareness (i.e. consciousness). With executive control emerging from this awareness. • Future Directions • The future of GLAM-PS involves two principle aims: • To incorporate a learning mechanism into a new version of GLAM-PS and use this to model a large dataset of human learning data from the Tower of London. • To extend GLAM-PS to other problem solving and memory domains. An extension to algebra problem solving and to serial verbal recall are two options being considered currently. • Please feel free to suggest ways in which GLAM-PS might be extended best! References Anderson, J. R. (1993). Rules of the mind. Hillsdale, NJ: Lawrence Erlbaum Associates. Anderson, J. R., Bothell, D., Byrne, M. D., Douglass, S., Lebiere, C., & Qin, Y. (2004). An integrated theory of mind. Psychological Review, 111, 1036-1060. Barsalou, L. W. (2008). Grounded cognition. Annual Review of Psychology, 59, 617-45. Contact: Dr. Gareth Miles, Humanities and Social Science, University of Glamorgan, Pontypridd, CF37 1DL (gmiles@glam.ac.uk)